Arduinoで周辺I/Oを作りこんだりするカスタムシールド作成用の基板です。
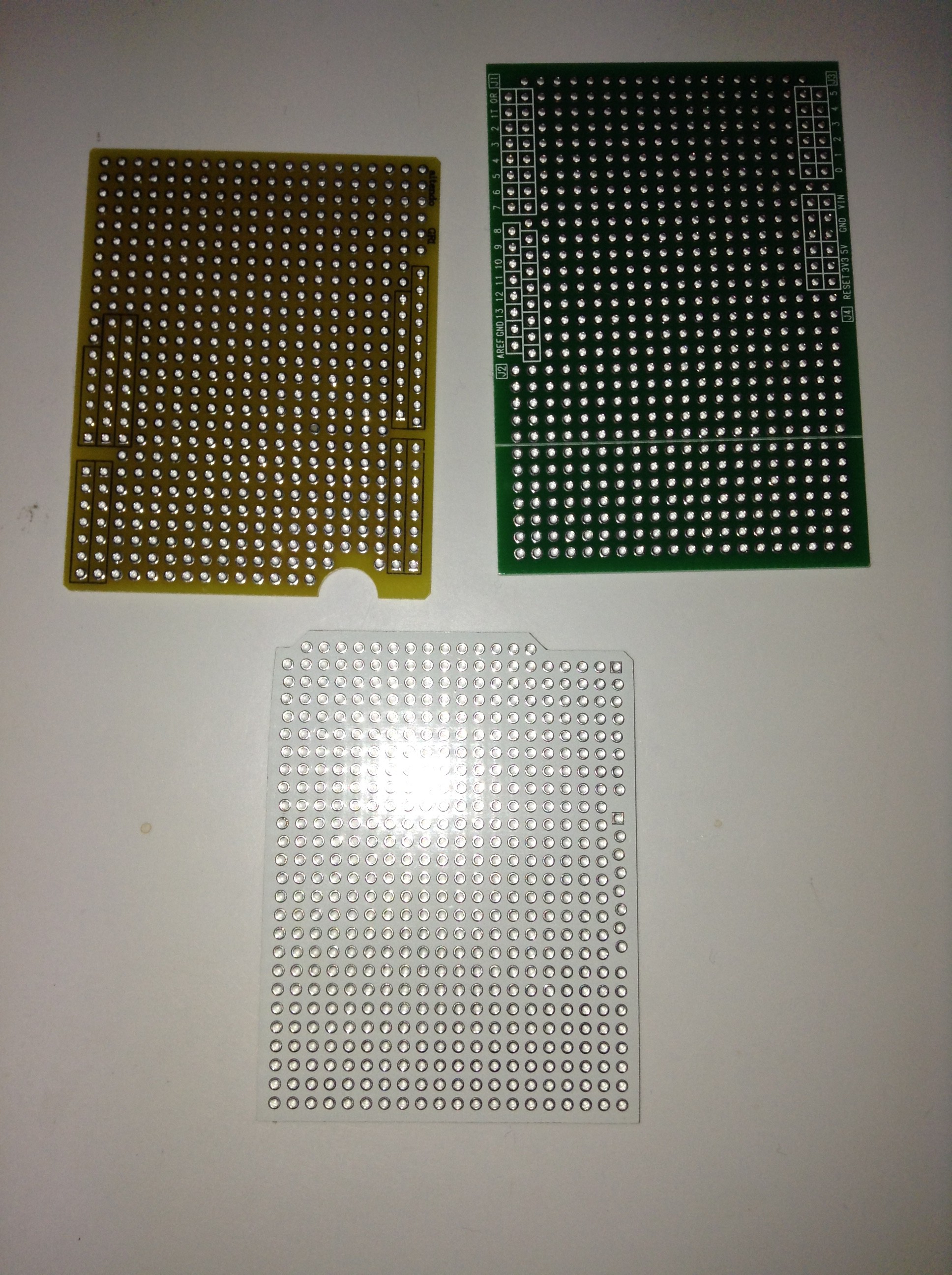
UNOに形を合わせてある下側の基板はスイッチサイエンスのバニラシールド@400
右上側の基板は秋月電子取り扱いの基板@200(なお赤基板が割安とのことです)
左上側の基板はAitendo取り扱いのシールド作成基板@200

Embedded Software Camp for Youth
Arduinoで周辺I/Oを作りこんだりするカスタムシールド作成用の基板です。
UNOに形を合わせてある下側の基板はスイッチサイエンスのバニラシールド@400
右上側の基板は秋月電子取り扱いの基板@200(なお赤基板が割安とのことです)
左上側の基板はAitendo取り扱いのシールド作成基板@200
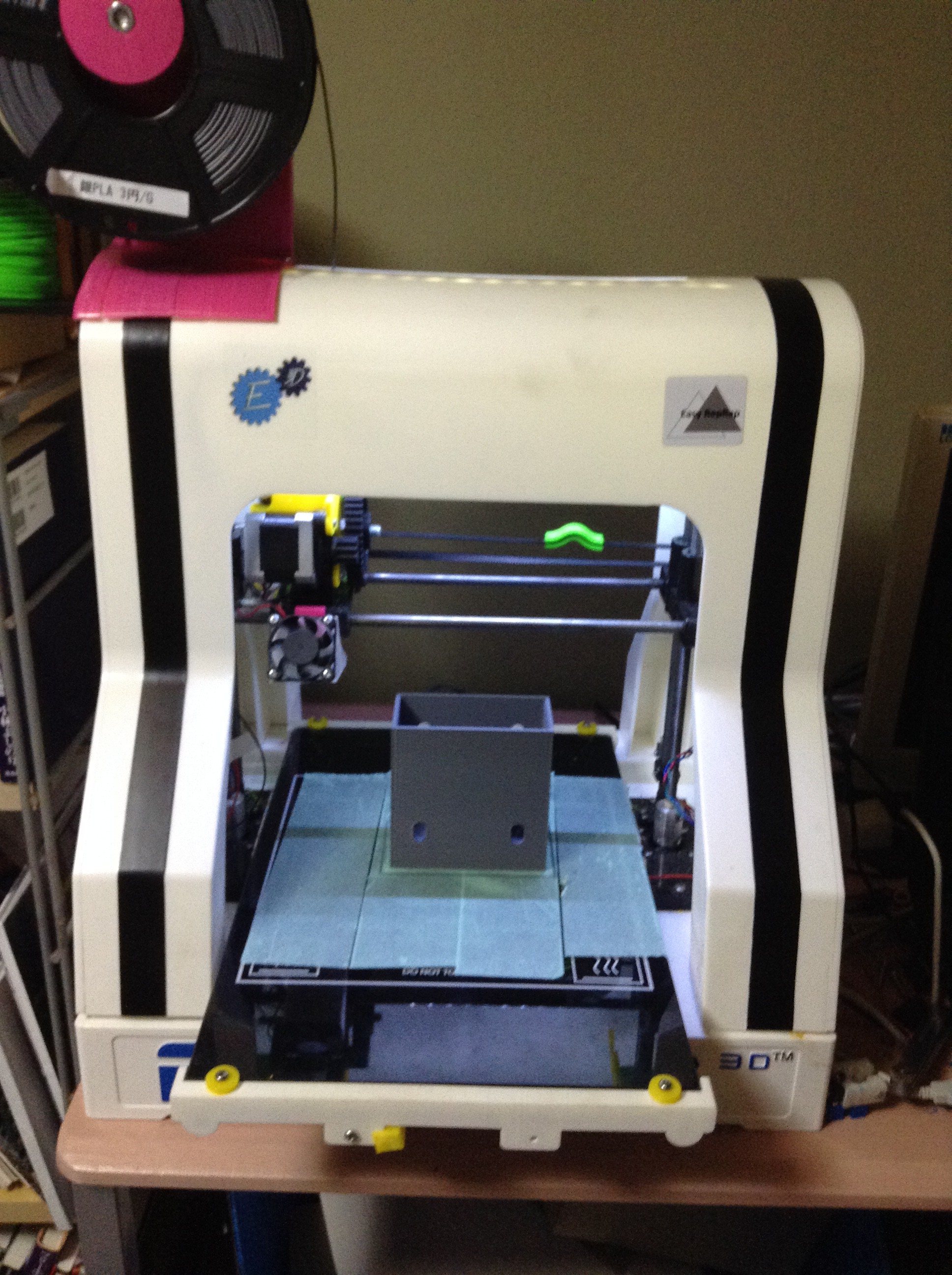
里に設置している3DプリンターはKickStarterでスタートしたモデルで現在は進化したものが製品化されていますので、出来るだけ製品に近い性能が出るようにupgradeを続けています。
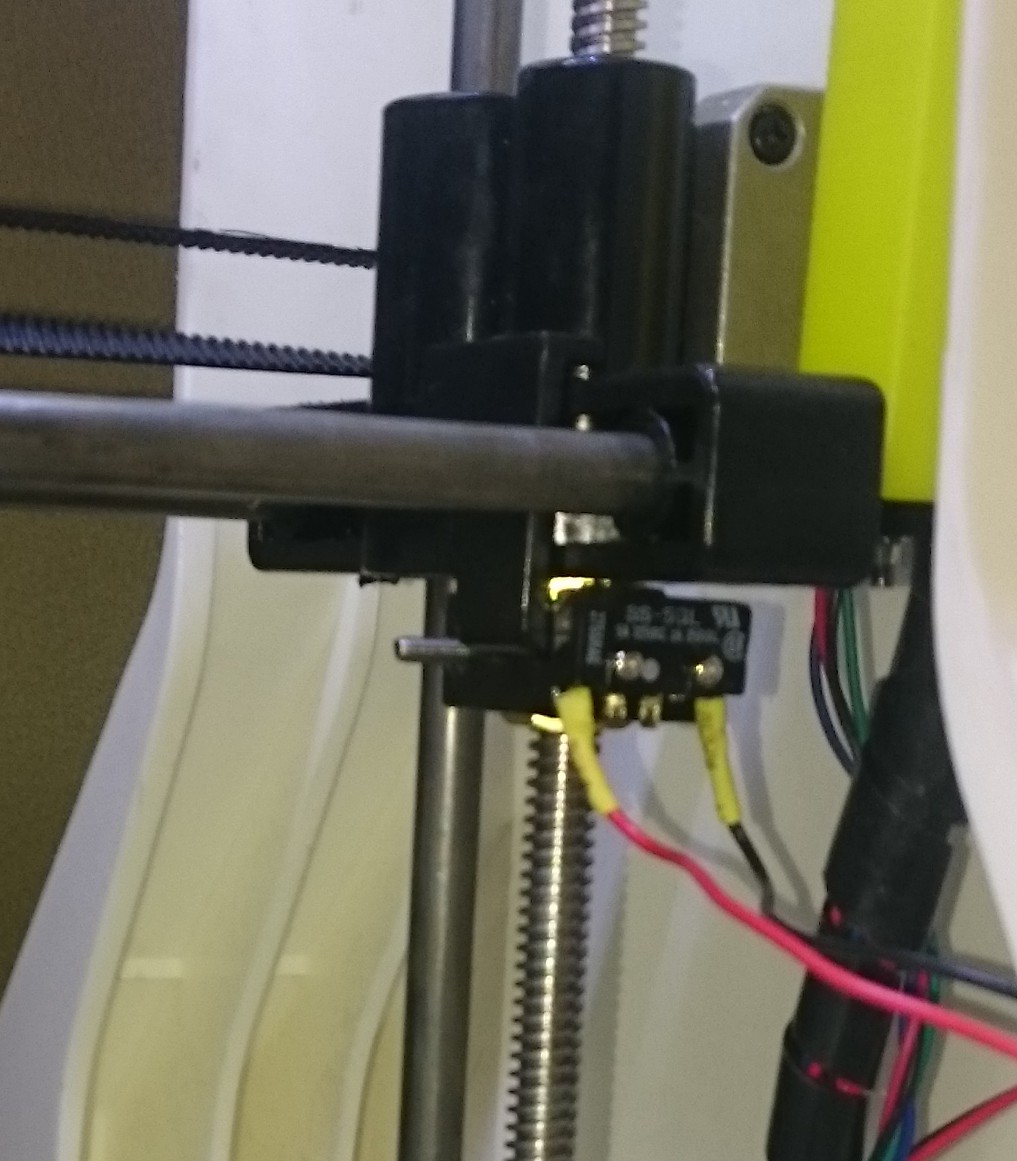
以下の写真にあるようにプリントヘッドを支えているX軸(左右)のレールがZ軸のロッドで上下します。今回の変更で下側にマイクロスイッチが付けられています。Z軸(上下)のゼロ点設定が、ヒートベッド上のマルチポイントで測定されてテーブルやレールのひずみを補正するという動作になるそうです。
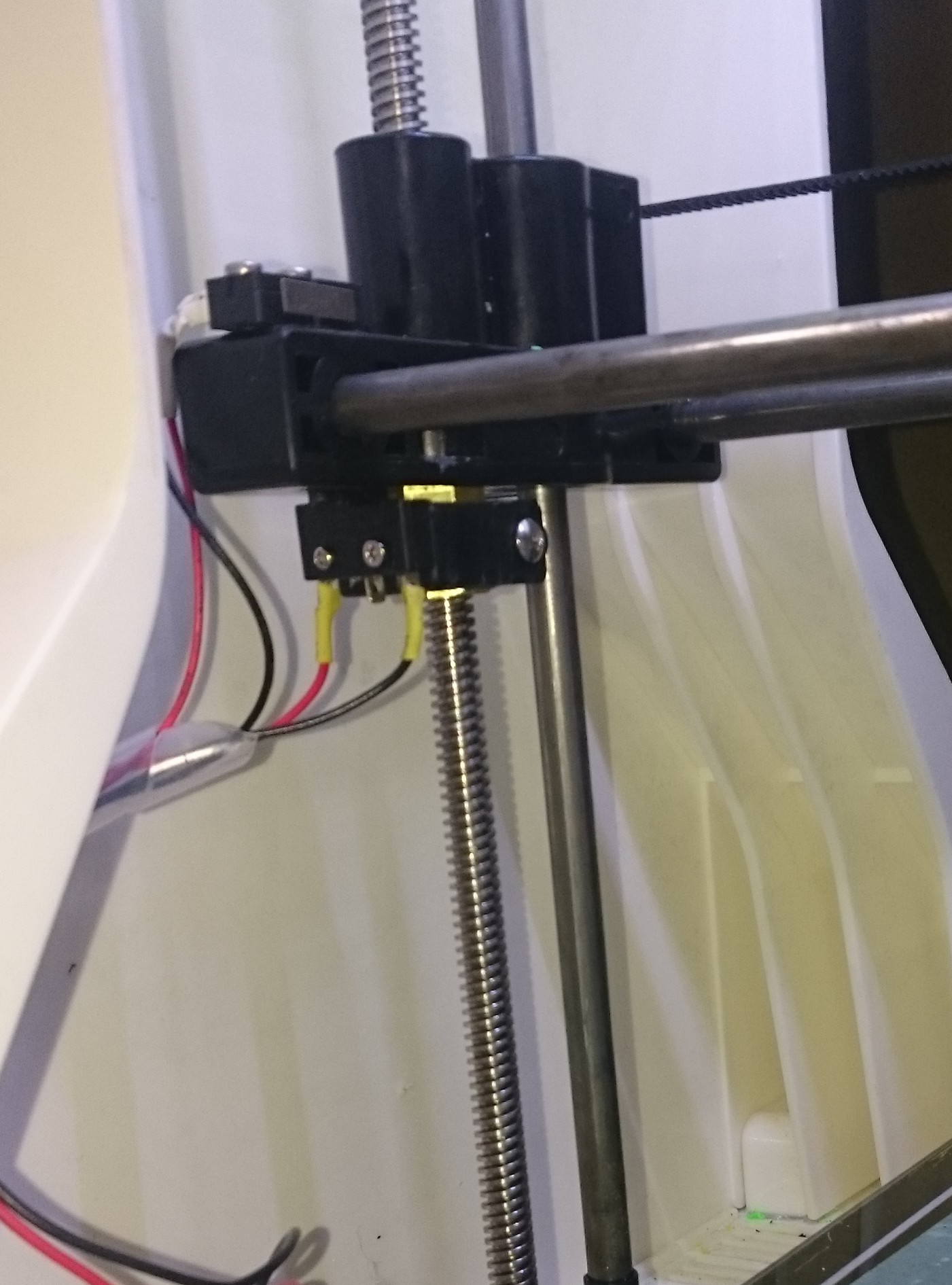
今回の修正では、Z軸のロッドが以下の写真のようなモーター一体型になりました。
また、カップリングナットがステージとセンサーの双方を上下に昇降させることになります。ヘッドがベッドに当たるとセンサーのみが下降することになりスイッチが入ることになります。

3Dプリンターの制御機構はATMEGA2560のArduinoが搭載されていて、これにReprap仕様のプリンター制御シールドが乗っています。Z軸のEndstp接点入力にこれら二つのセンサーがパラ付けで接続されます。どちらかの接点がメークすることで検知します。実際にステージの自重などでひずみも生じ左右での差異がでますので、この機構は正しいと思います。
3Dプリンターの制御はWin7ノートPCで実践してきましたが、Windows10への移行もありさらにUbuntuとの切り替えも含めて今日はUbuntu環境にもArduino開発環境とプリンタ制御ソフト(MatterControl)の双方をインストールしました。
3Dプリンターとの通信制御には250kbpsという速度設定が、当初は壁になっていましたが、この二年余りのLinux環境の進化で問題なく普通にインストールで動作するようになりました。次週には動作報告が出来るかと思います。
おまちください。

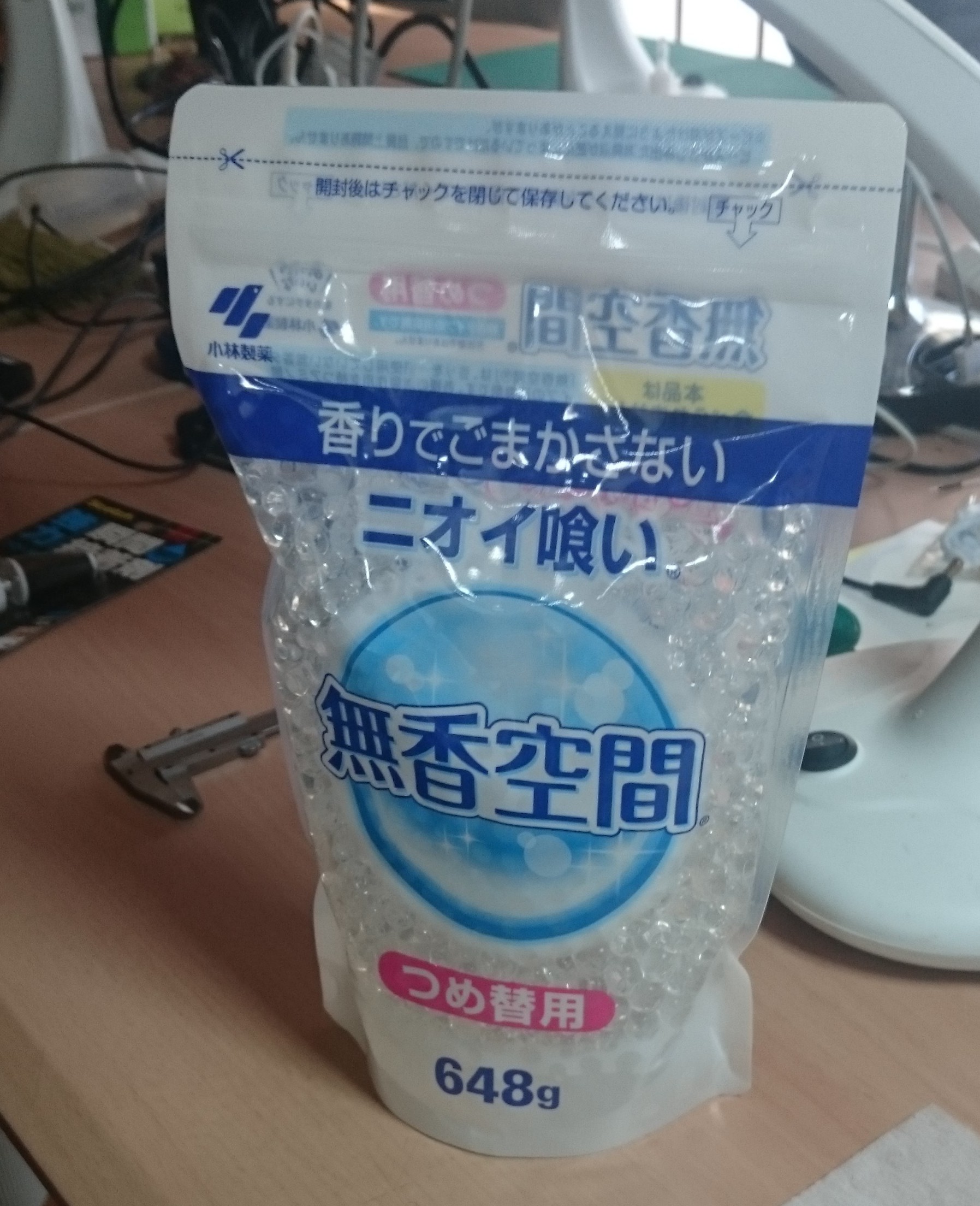
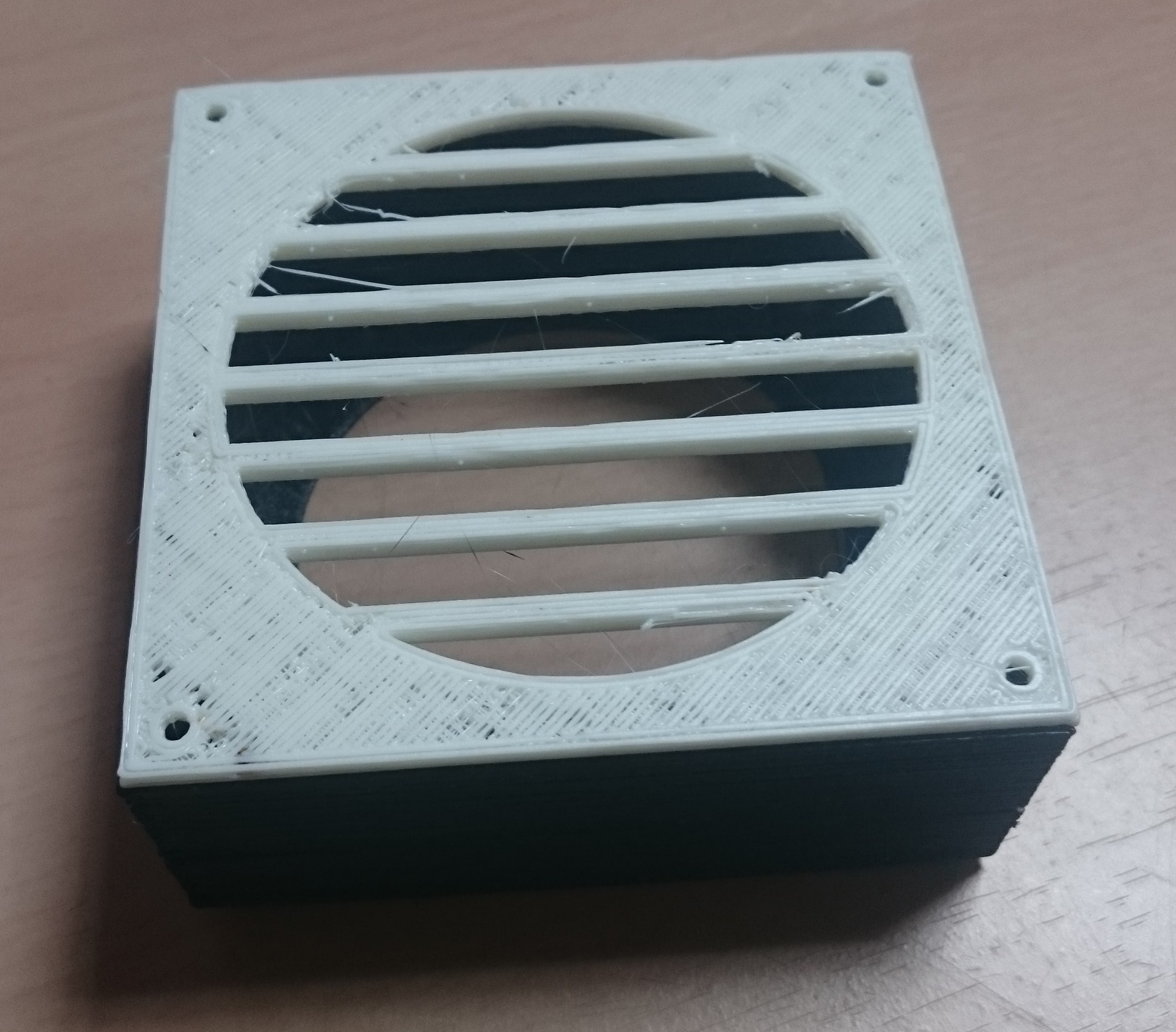
土曜日に作成したフィルターボックスには、消臭剤入りの袋を搭載しました。
半導体レーザーの保持部にゆるみがありましたので、ガタつきが起きていたようです。再度締め付けを行い、ガタをなくしました。ベルトのテンションについては再検討します。
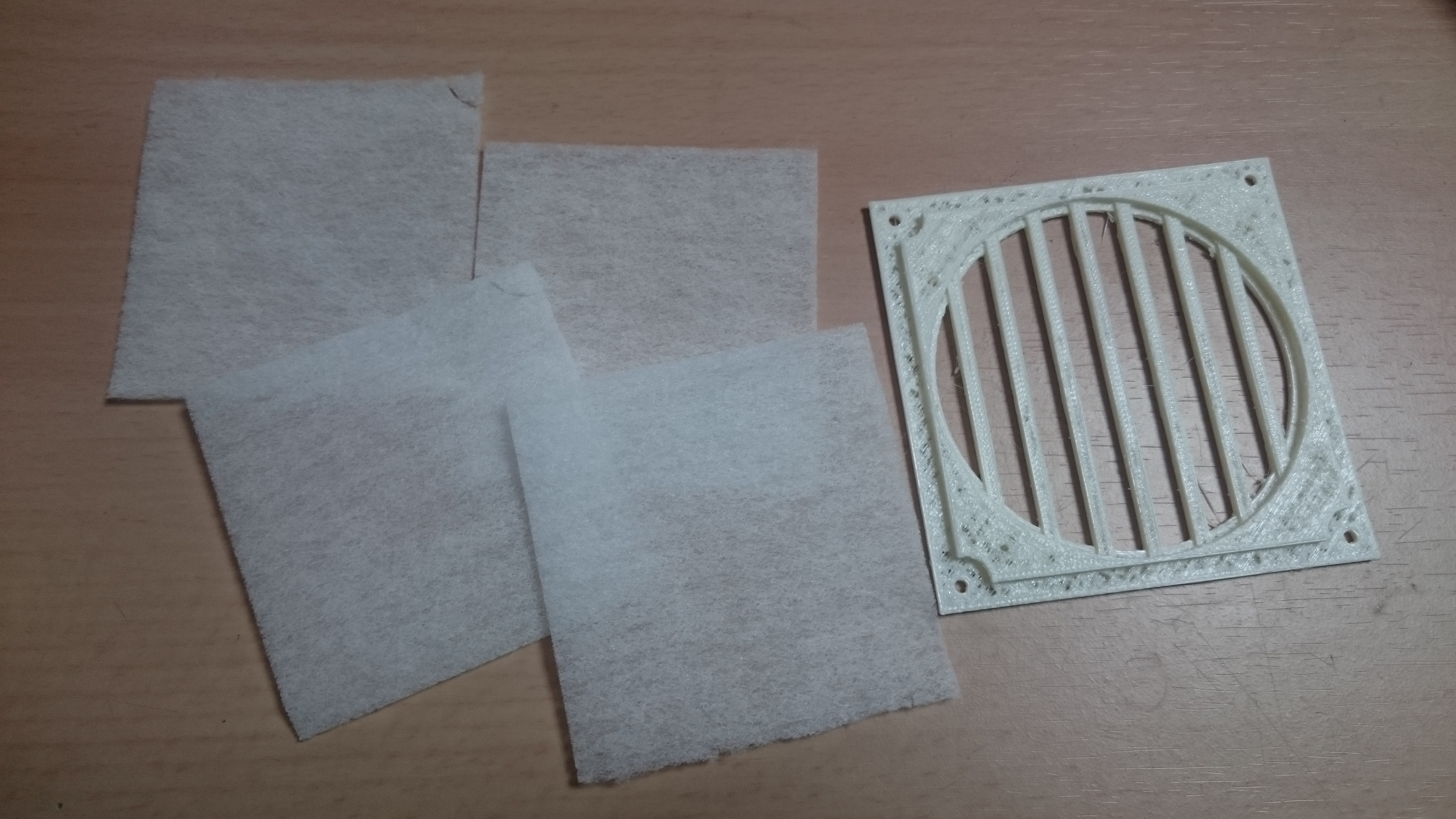
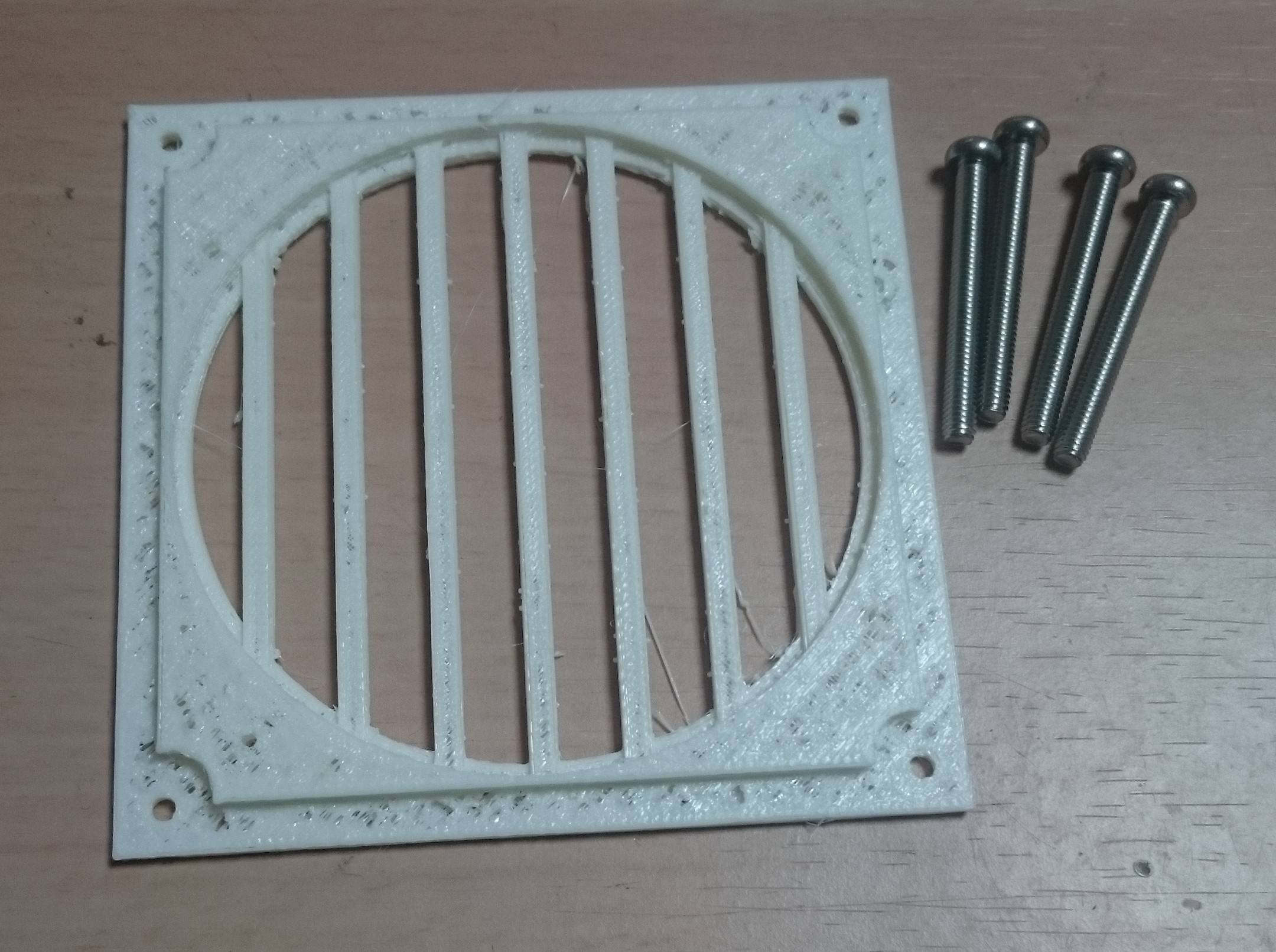
組み込みの里では、パワーは小さいもののレーザーカッターがあります。メカニズムとしては焼き切るので、臭いが発生します。縁側においてやるという意見もありますが、対策はとりたいと思います。簡易脱臭機構を3Dプリンターで印刷してみます。脱臭剤の粒を収納するポケットは、まだ印刷中です。ケースとフタは出来ました。簡便に、この箱にお茶の葉の袋にいれてまずは効能を確認します。珈琲豆の残渣を


ちっちゃものくらぶさんの新製品です。CH340Gの中華USBシリアル搭載。
@700です
先日の薄型とは異なり、二段重ねの丸型タイプです。
@90

I2Cのスペックは100kHzで低速ですが、8bit I/Oエキスパンダーです。
@50

組み込みの里にRobo3Dプリンターがやってきたのは2年前ですが、よく実体がわからないままに先にABSのフィラメントをまとめ買いしてしまいました。PLAとABSの双方が対応できるプリンターでしたが、購入したモデルはKickstarterに上がった初期版で、ABSの安定化出力を達成するのには無理がいくつかあり、興味を持ってトライしていた大学院生や高専生もメカトラブルなどから、「PLAの出力のほうが精度も含めてよさそうだ」とABSの利用が遠のいていました。
Robo3Dの改版に沿って改修してきたことから、ABSを再評価し始めたところ放置していたフィラメントに巻かれていたラップが劣化してフィラメントにまとわりつくようになっていました。このままでは、フィラメントと一緒に送りこまれてトラブルになると思われます。注意深く、ラップをはがすと共に、フィラメント側についたラップの切れ端も巻き戻しながら取り去る手間をかけて処置しました。
二年が経過した未使用のABSフィラメントは劣化してきた感じで折れやすくなっている気がします。プリンタの台数を増設するなどして利用を進めたいと思います。簡単に利用できるように工作室のスペース確保とWifiサーバー化を進めていますので、ご期待ください。
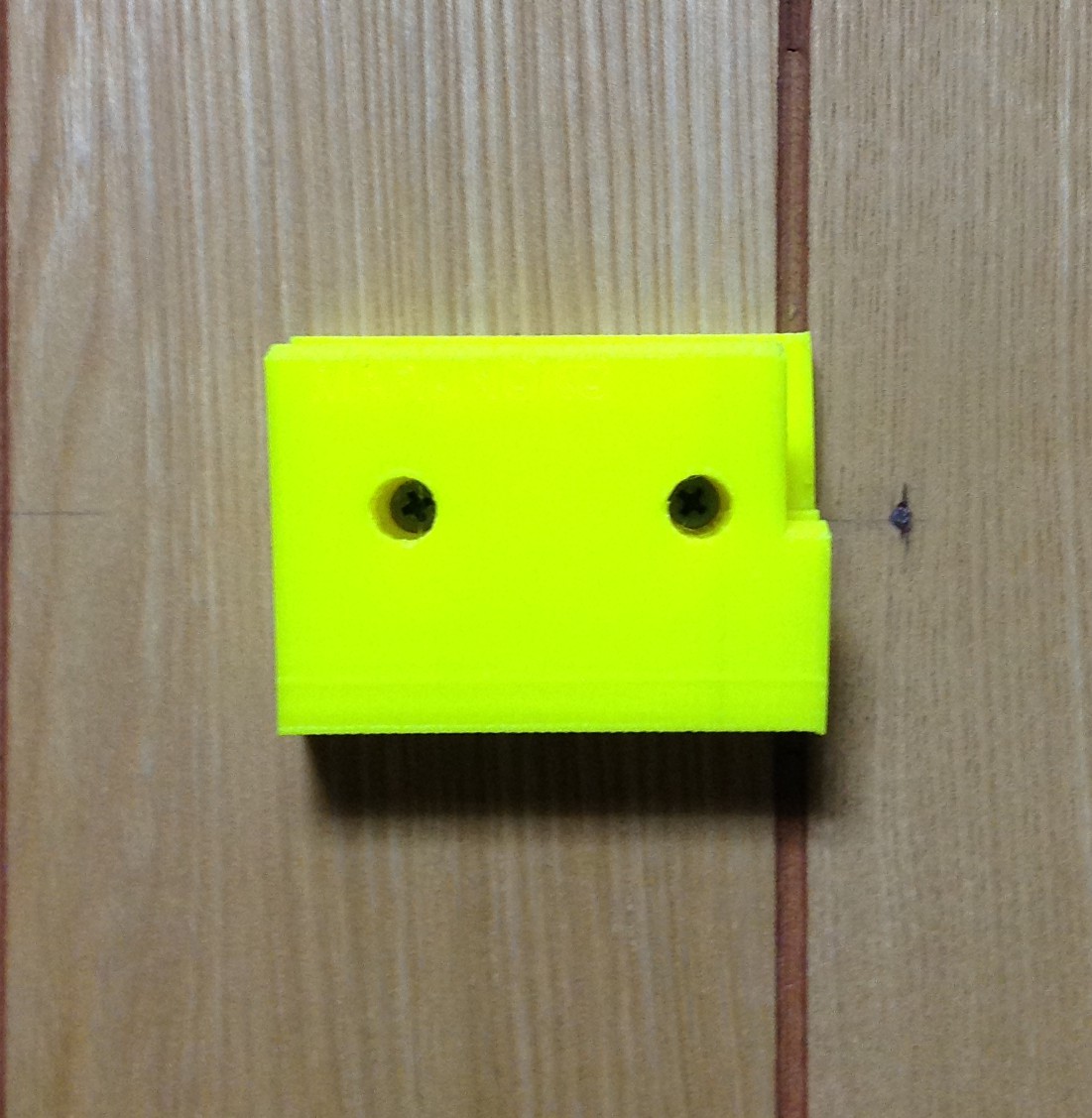
Robo3DプリンターのABS出力も含めて安定化したこともあり、工作室の作業台の上で場所をとっている電動工具シリーズをフック作成して壁にひっかける作業を進めています。
作成ソフトは123 Designで結果thingiverseに展開します。
作例1) マキタ電動丸ノコフック

作例4) ワイドフック

CR2032が二個横に入るスイッチ付き電池ケース @80です。






{kind=link}