STP55NF06L 在庫しました。@60

Embedded Software Camp for Youth
STP55NF06L 在庫しました。@60
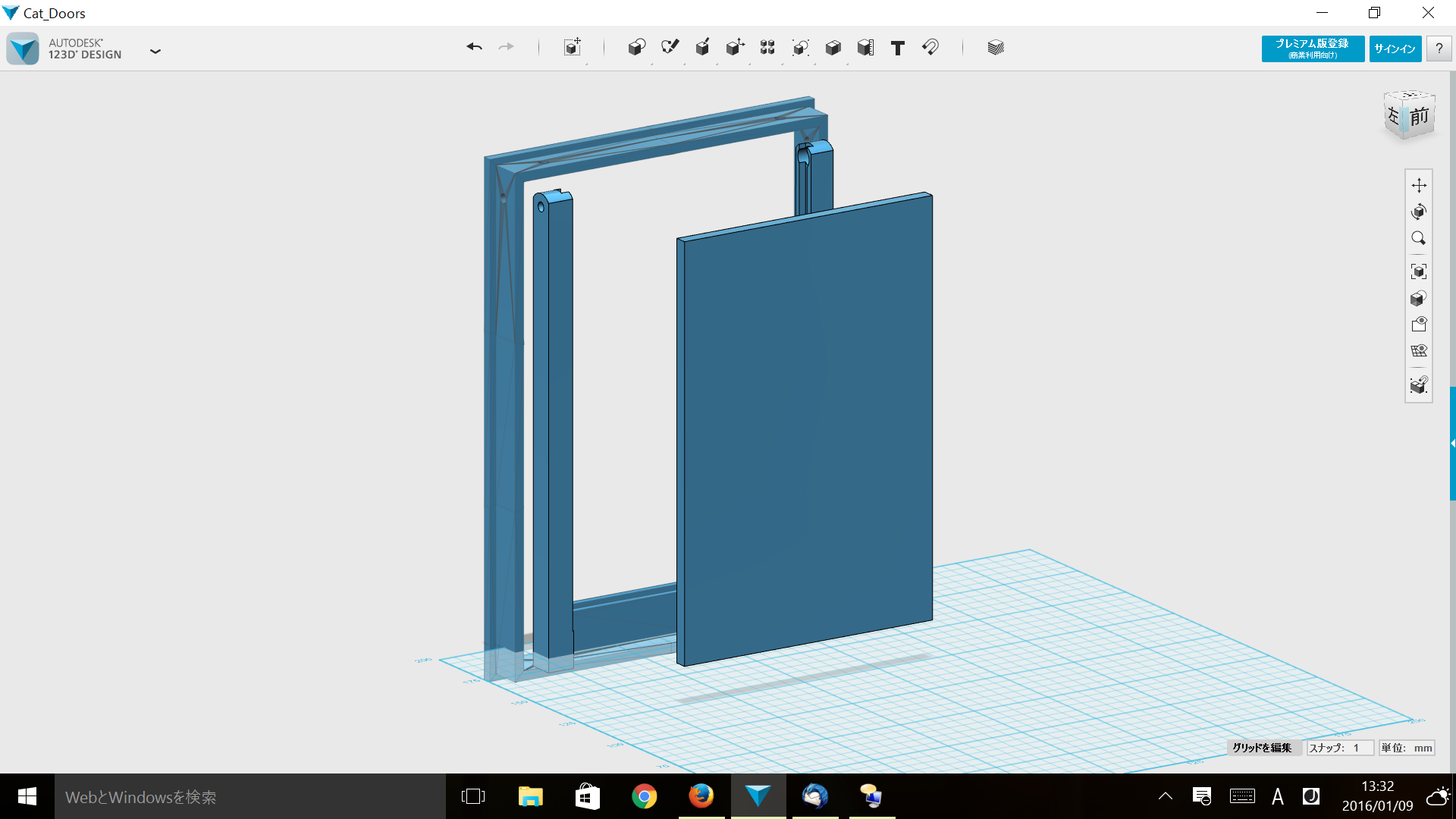
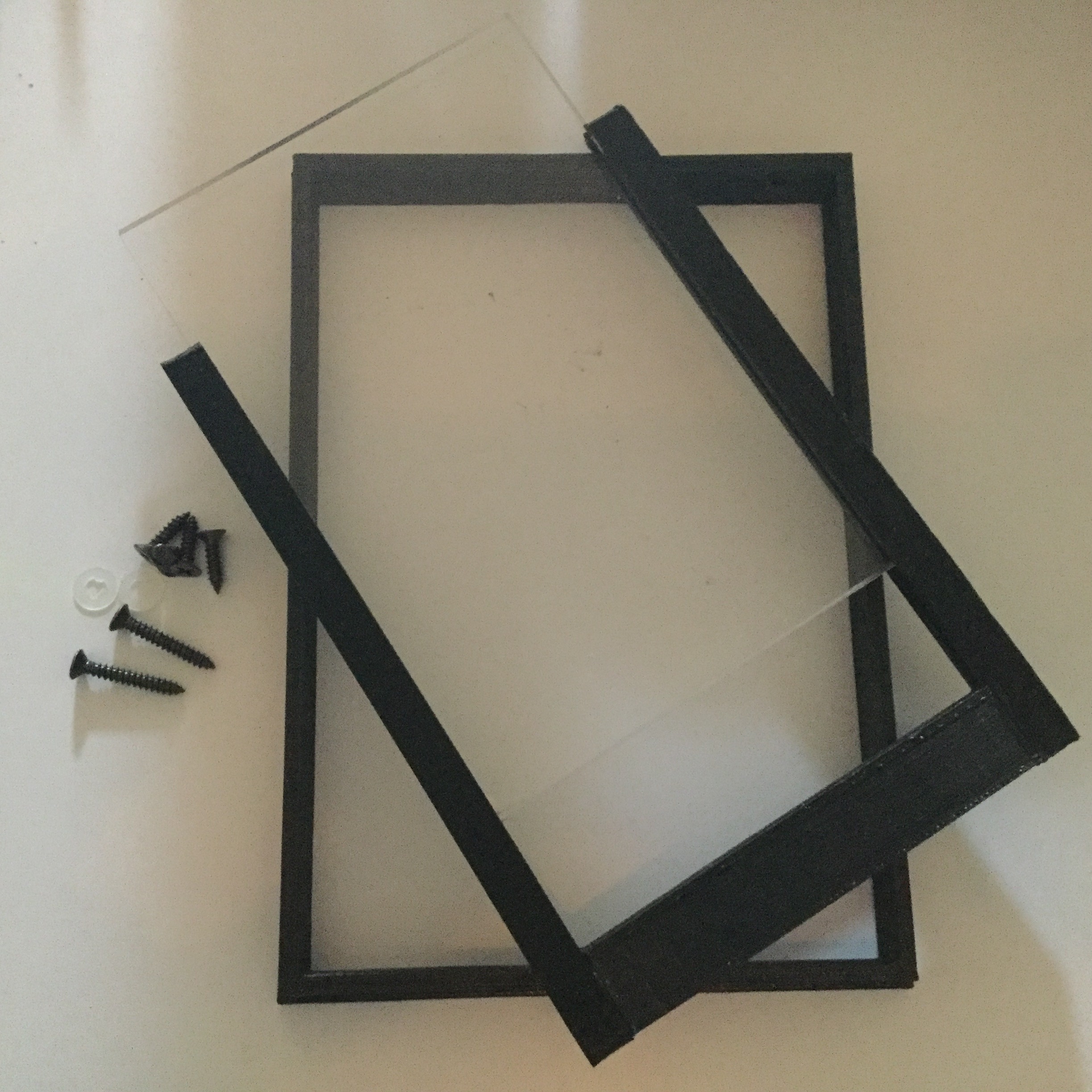
猫ドア第1世代は、アルミサッシに木枠をカスタマイズして作成したものに100×150の穴をあけたところに簡易にA4ファイルポケットを材料にカットして幅広の透明テープで止めていました。市販の猫ドア程度の精度で風の吹きこみを抑えたいので3Dプリントして現在の枠に当てるフレームと、ドア本体とを作成するものです。123Designで、フレームとドア本体の枠を作成します。確認の意味でアクリル板の部分も3Dソフト上で作っています。
こちらが第一世代の状況です。

そして、こちらが第二世代です。猫達も、慣れたようです。


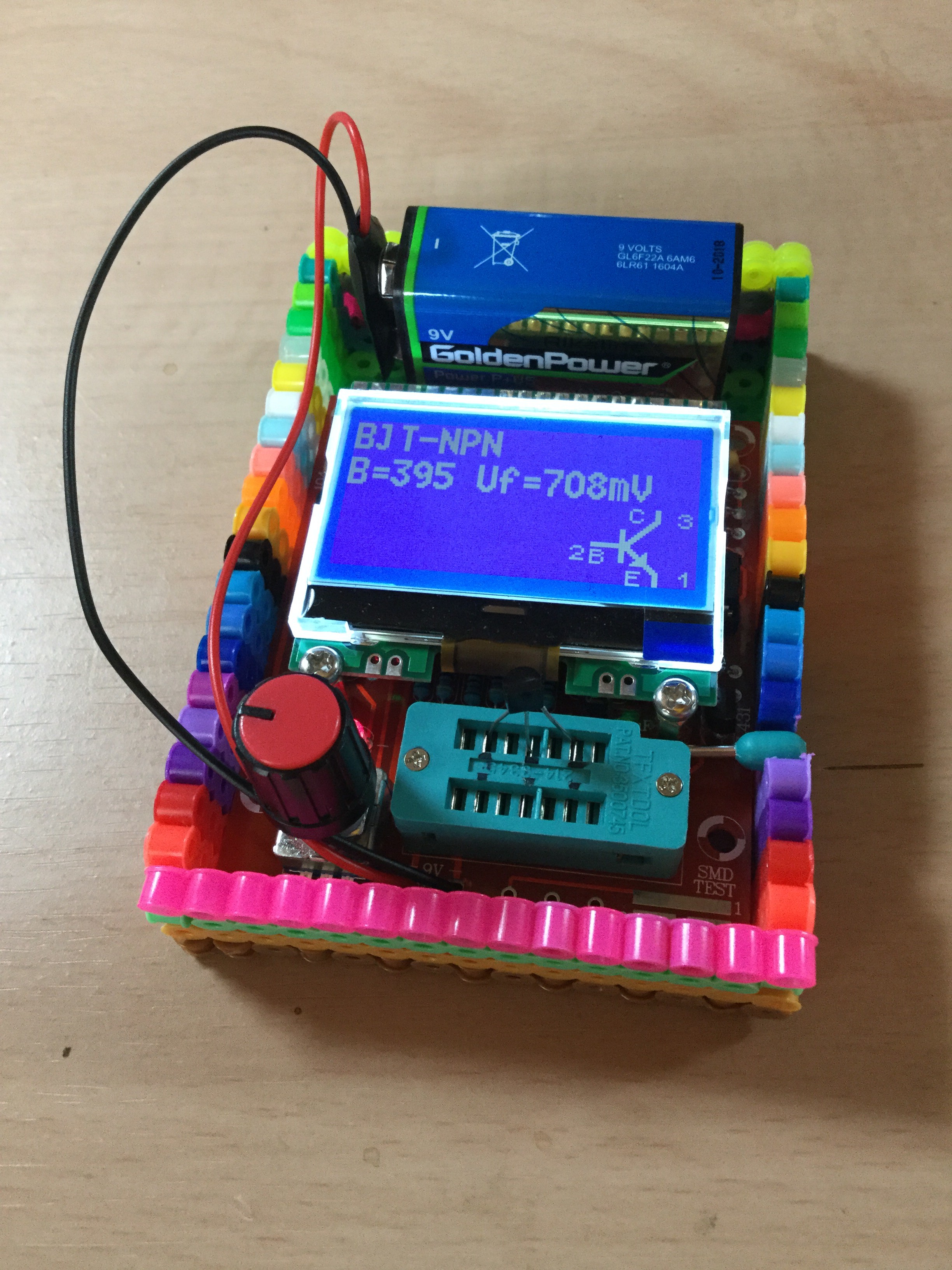
Arduinoベースのトランジスタテスターです。トランジスターの極性判定、HFE測定やLCRの計測なども出来るキットですが、簡易な目的ならば、それなりに使えると考えられる人も多そうなので電子工作をされる方が持っていそうな測定器と比較することにしました。
測定に供したものは、以下の通りです。

比較したのは、里にもある秋月で取り扱いの英国PEAKS社の4機種です。
比較目的は、あくまでも、このテスターキットの確認ですが、必ずしもPeaks社の商品と同じ使い方が出来るわけではありません。

| トランジスターテスターの評価テスト | 2016/1/7 | 組み込みの里 | 木更津高専の協力 | |||
| 供試サンプル | LCR40 | ESR70 | DCA55 | DCA75 | M328 | ZM2372 (Accuracy 0.08%) |
| 33uF無極性コンデンサ | 34.63uF | 33.78uF ESR=0.25Ω |
– | – | 34.75uF ESR=0.21Ω |
31.861uF (1kHZ) |
| 224フィルムコンデンサ | 221.9nF | 測定範囲外 | – | – | 219.5nF ESR=0.23Ω |
222.39nF (1kHz) |
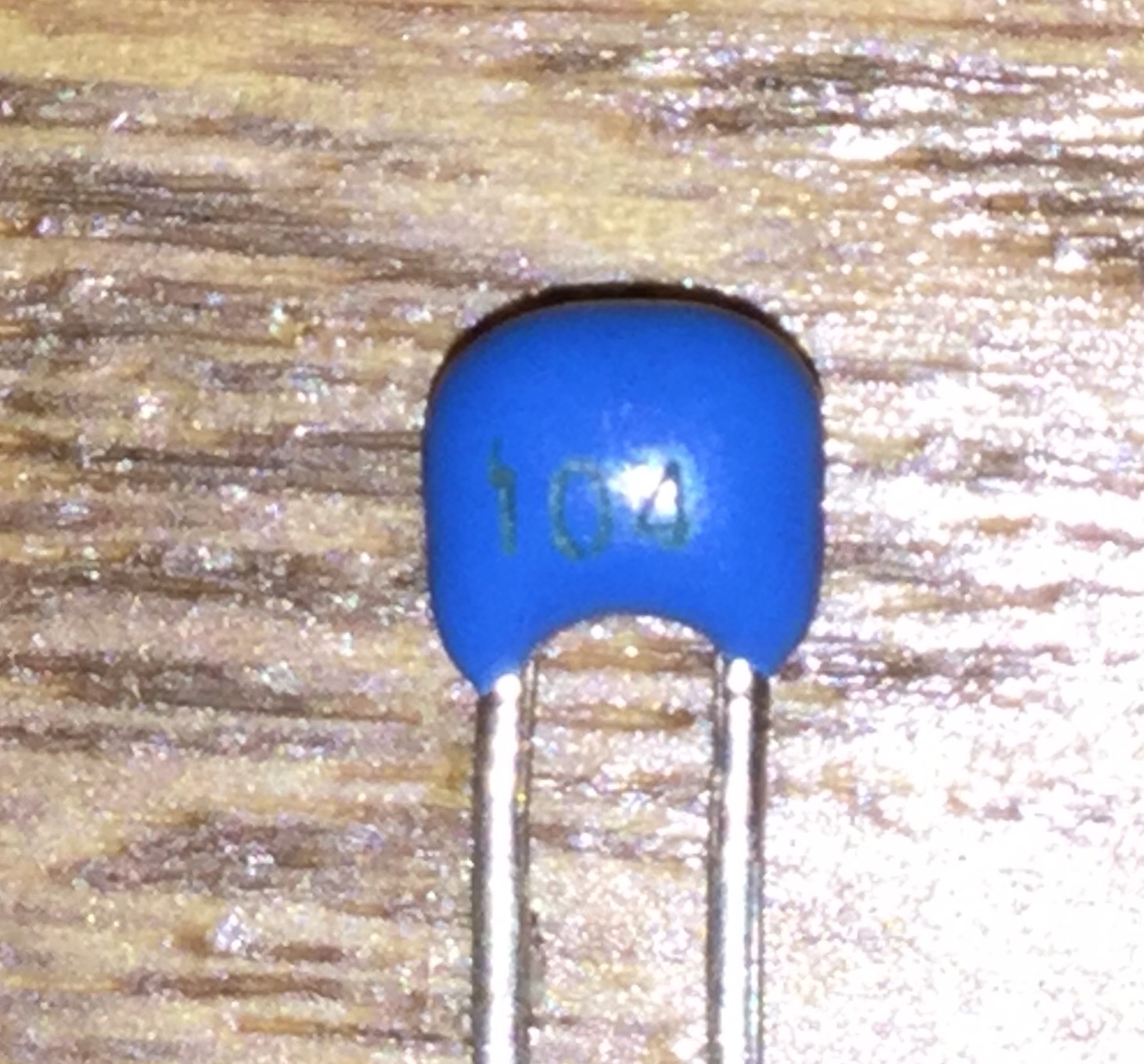
| 104積層セラミックコンデンサ | 91.74nF | 測定範囲外 | – | – | 94.57nF ESR=3.1Ω |
95.3nF (1kHz) |
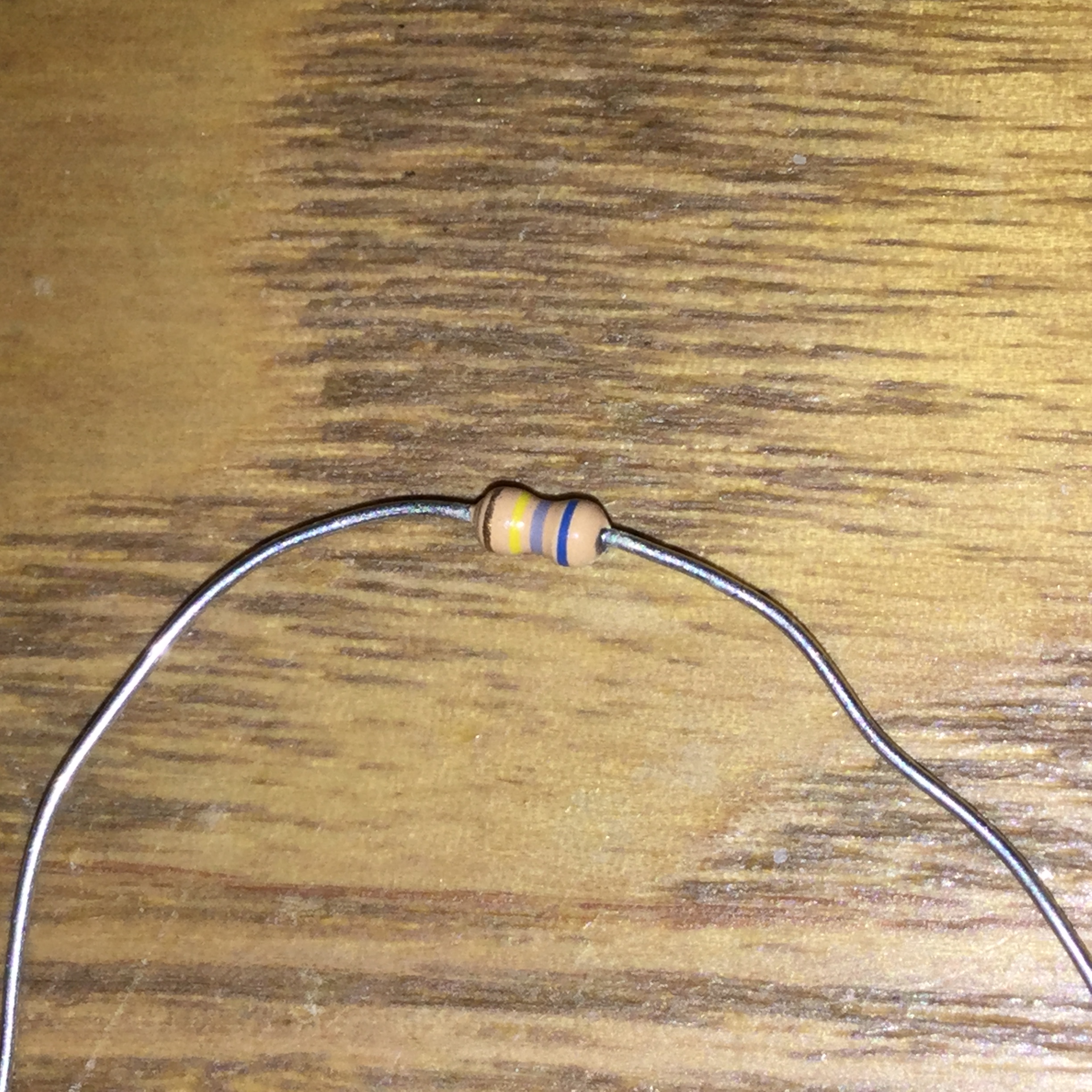
| 1/6w 680kΩ | 694.6kΩ | – | – | – | 687.6kΩ | 677.6kΩ |
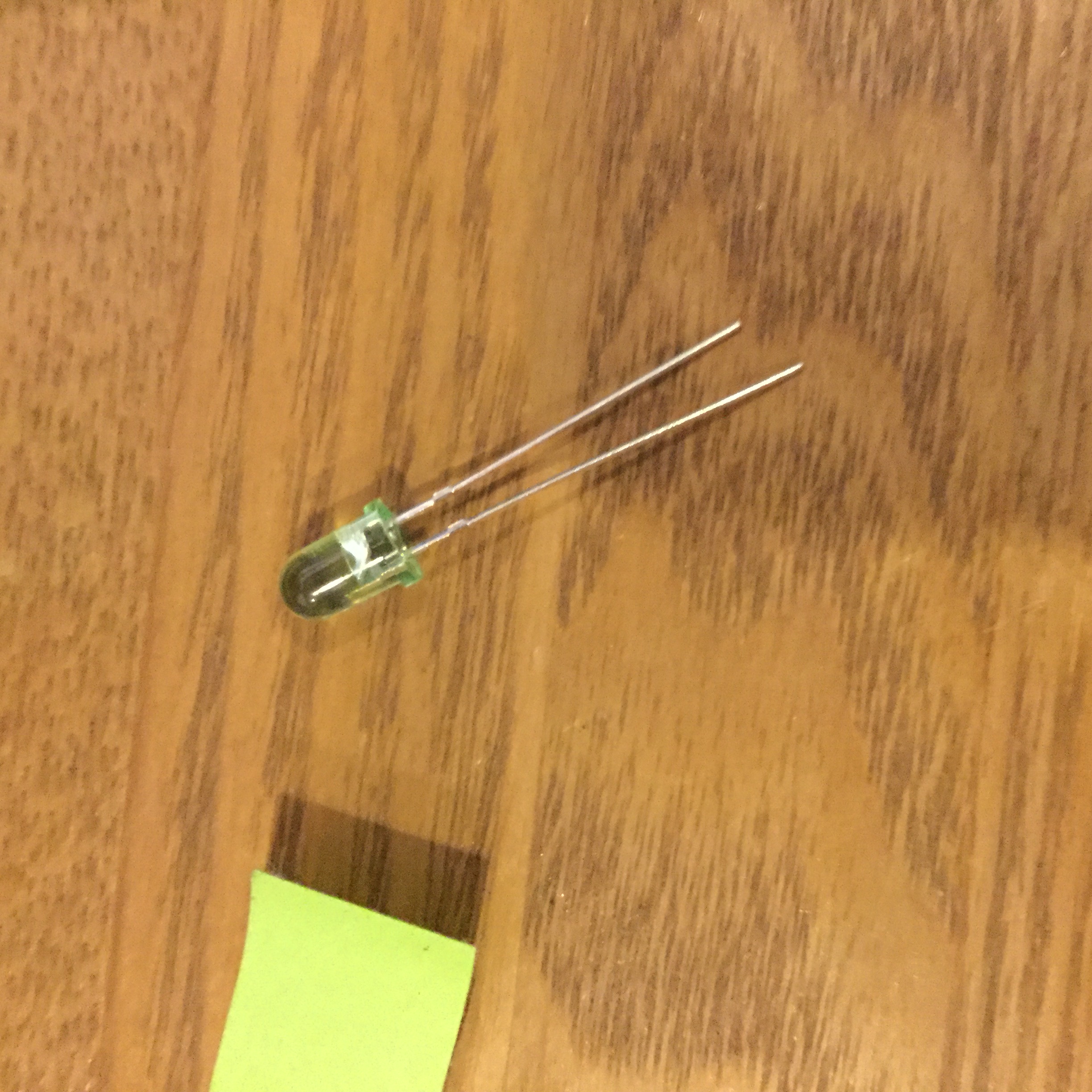
| 緑LED | – | – | LED or Diode Vf=1.97V |
LED Vf=1.977V |
Diode Vf=1.99V C=12pF |
– |
| S9014 | – | – | NPN Silion Tr Hfe=322 Vbe=0.78V |
NPN BJT Hfe=326 VBE=0.778V |
BJT-NPN B=434 Vf=0.714V |
– |
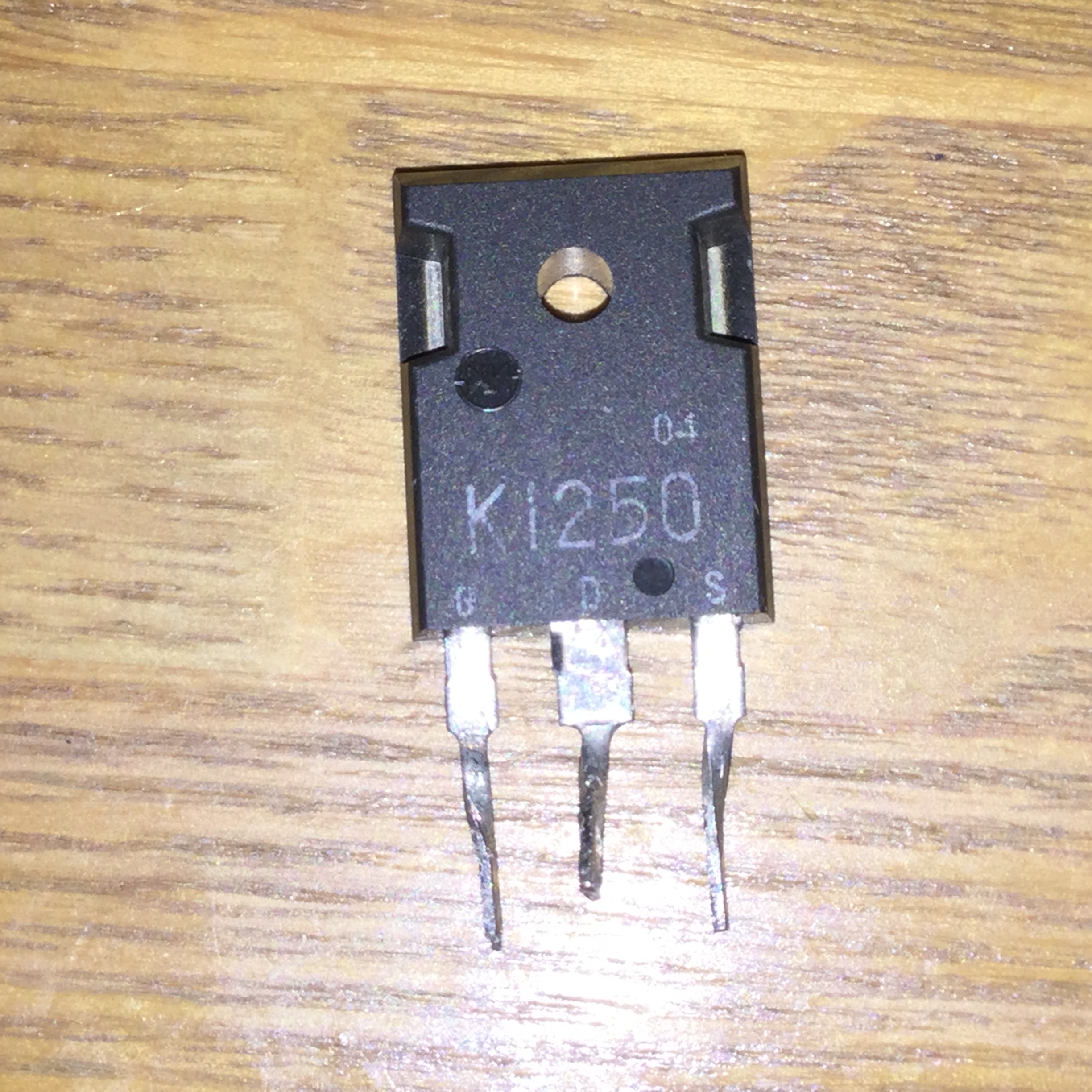
| 2SK1250 | – | – | = | Nch Enhancemebnt mode MOSFET Vgs=3.339V Vgs=2.512v(off) gm=32.9mA/V |
N-E-MOS Vt=3.4V |
– |
3Dプリンターが、修復モードにいるので取り急ぎ仮ケースをアイロンビーズで作成した。
まだまだ溶かし加減が慣れず、しっかりとしたケースを作るために試行錯誤しています。
ビーズを色別に買わなかったので、色盲検査をしているような時間となりました。
ようやくテンションスプリングが届いたので、レーザーカッターSmartLaserMiniに取りつけました。このレーザー加工機は3Dプリンターでのタイミングベルト装着とは逆に経路長を調節してテンションをかける構造になっています。もう少しテンションをかけたいといった目的には、3Dプリンター同様にテンションスプリングを使うことが出来ます。

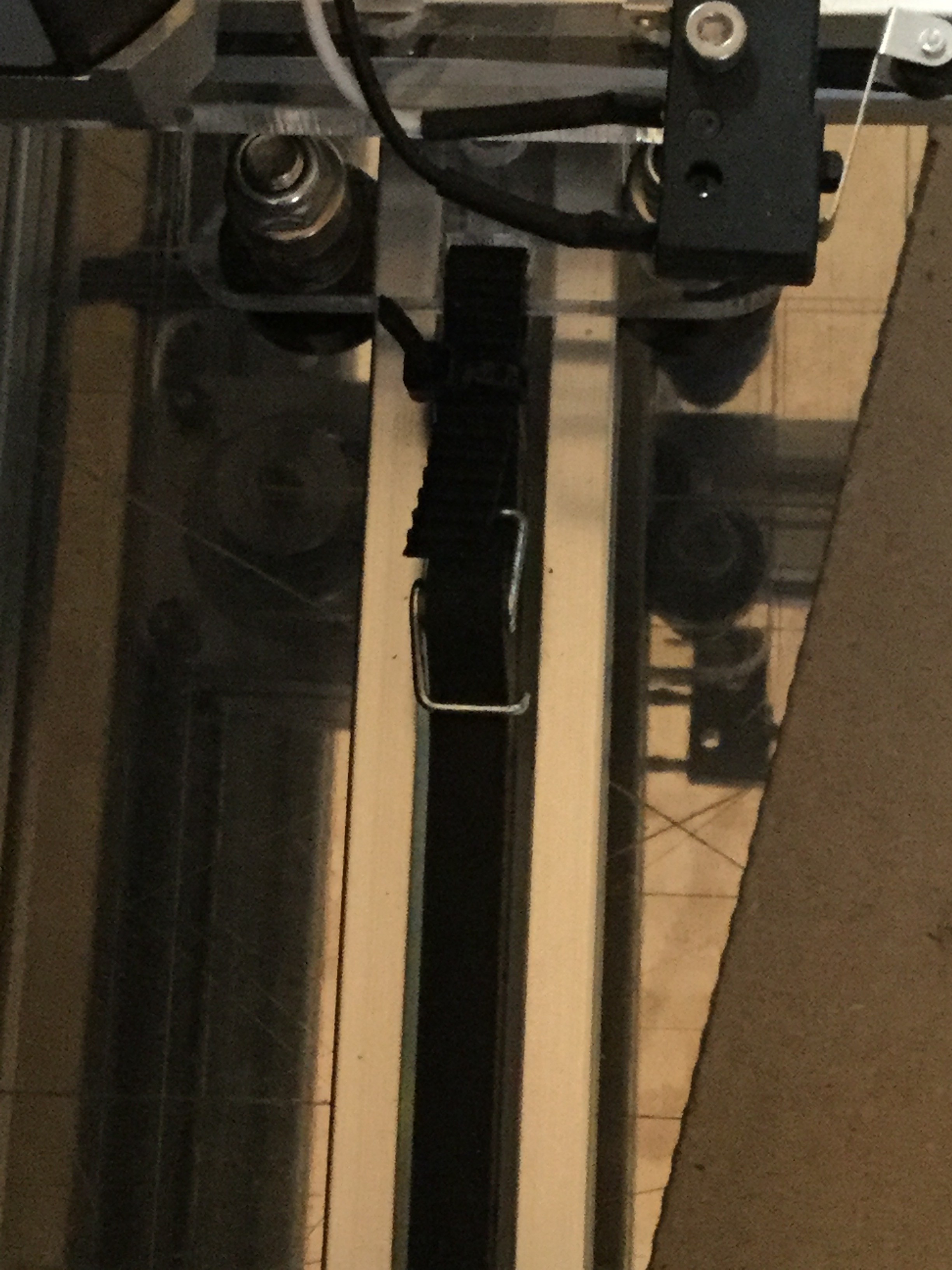
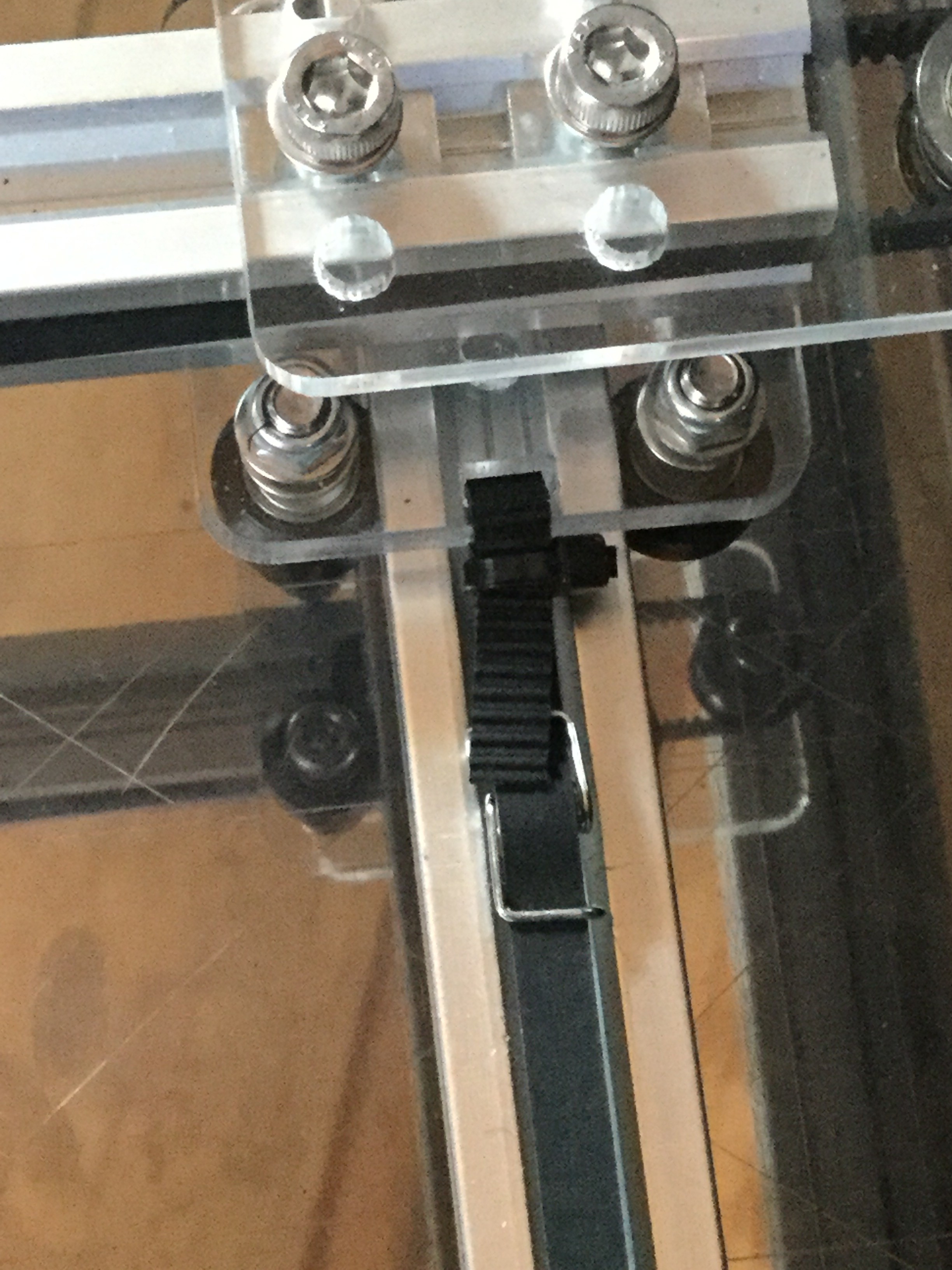
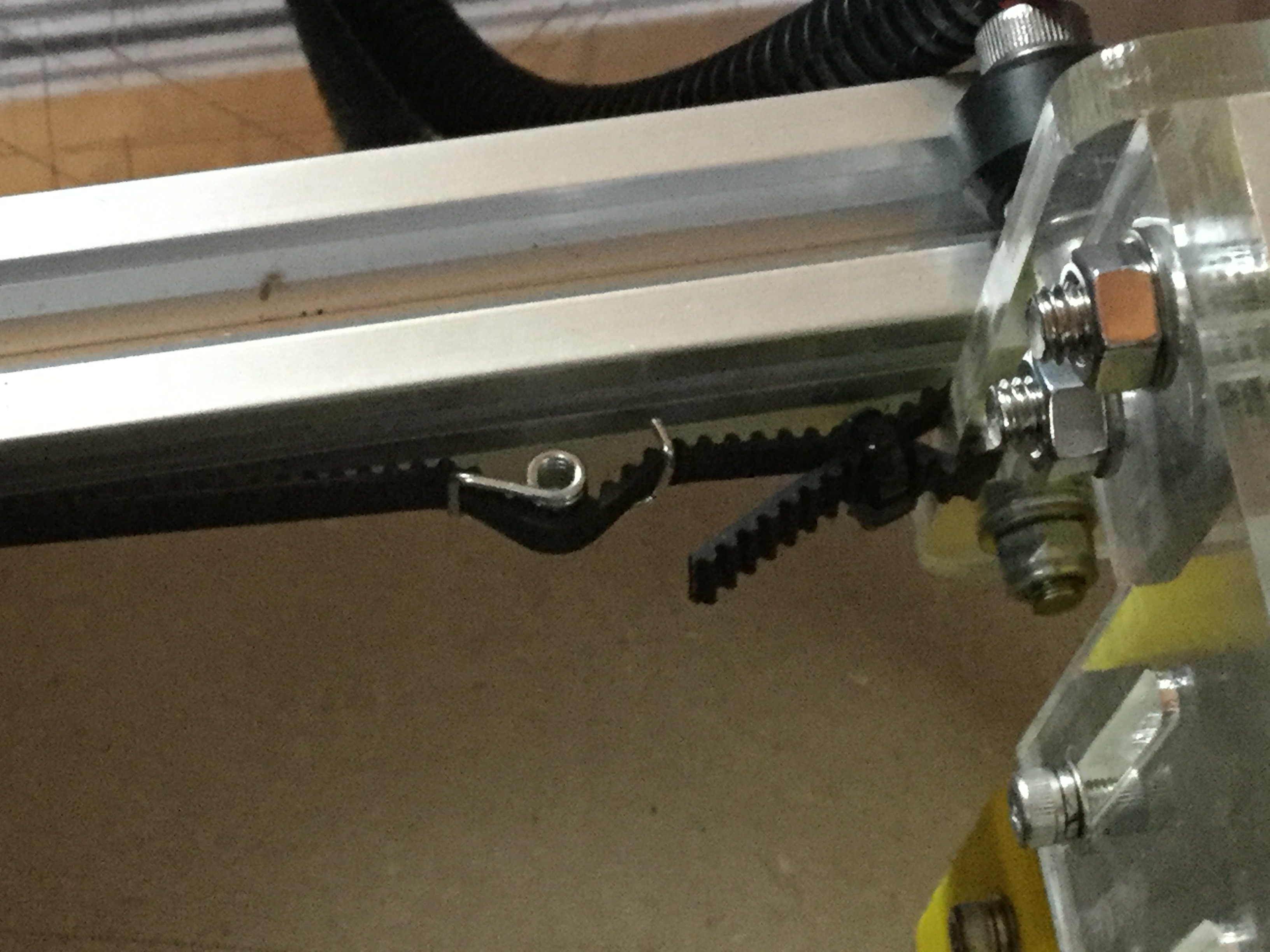
最近のレーザーカッター、3Dプリンターなどのタイミングベルトのテンションをかけるためのスプリングです。@50でおわけします。
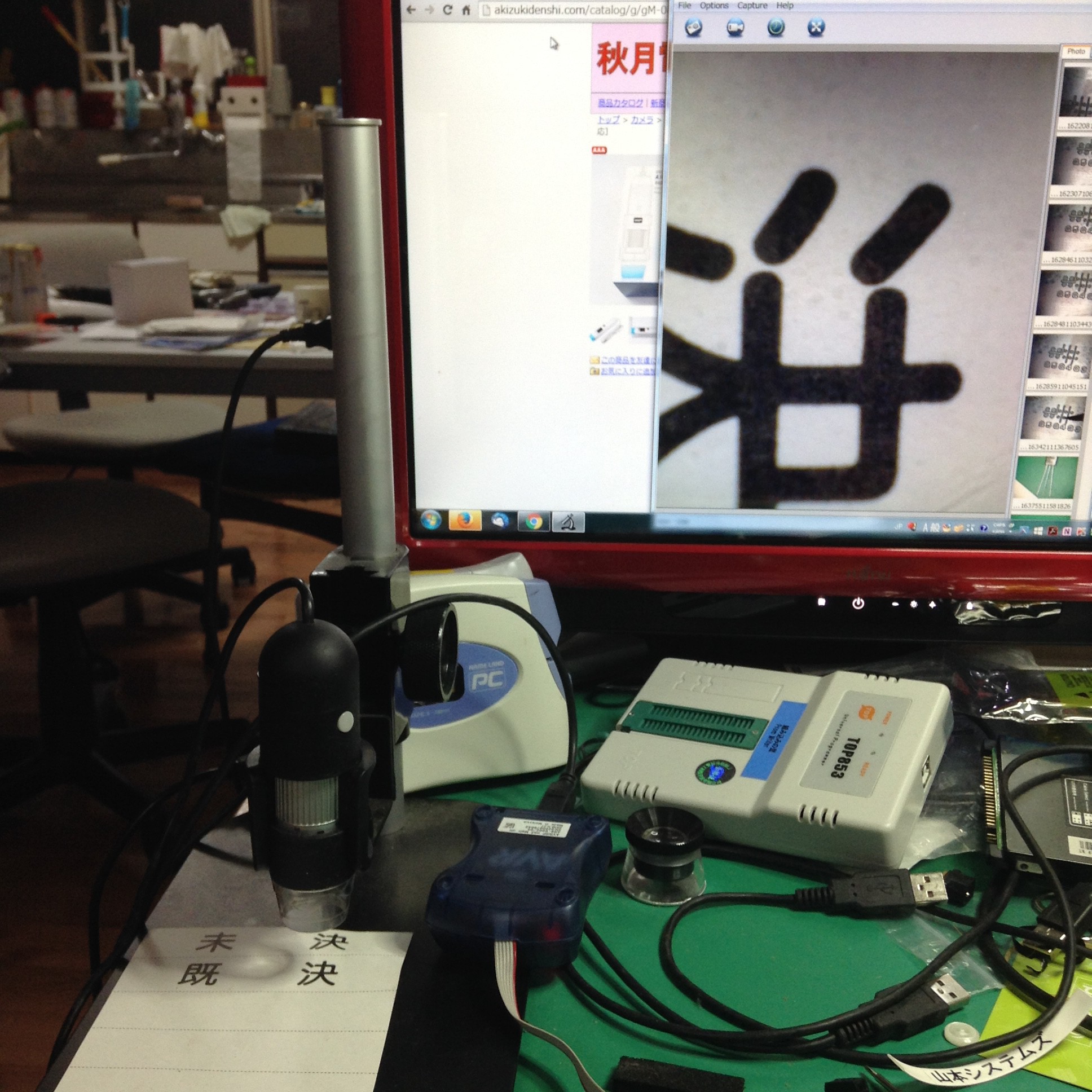
多年に亘って正しく使いこなせていなかったMicroCaptureだったが解決しました。
従来の見え方は、180度回転していましたが。
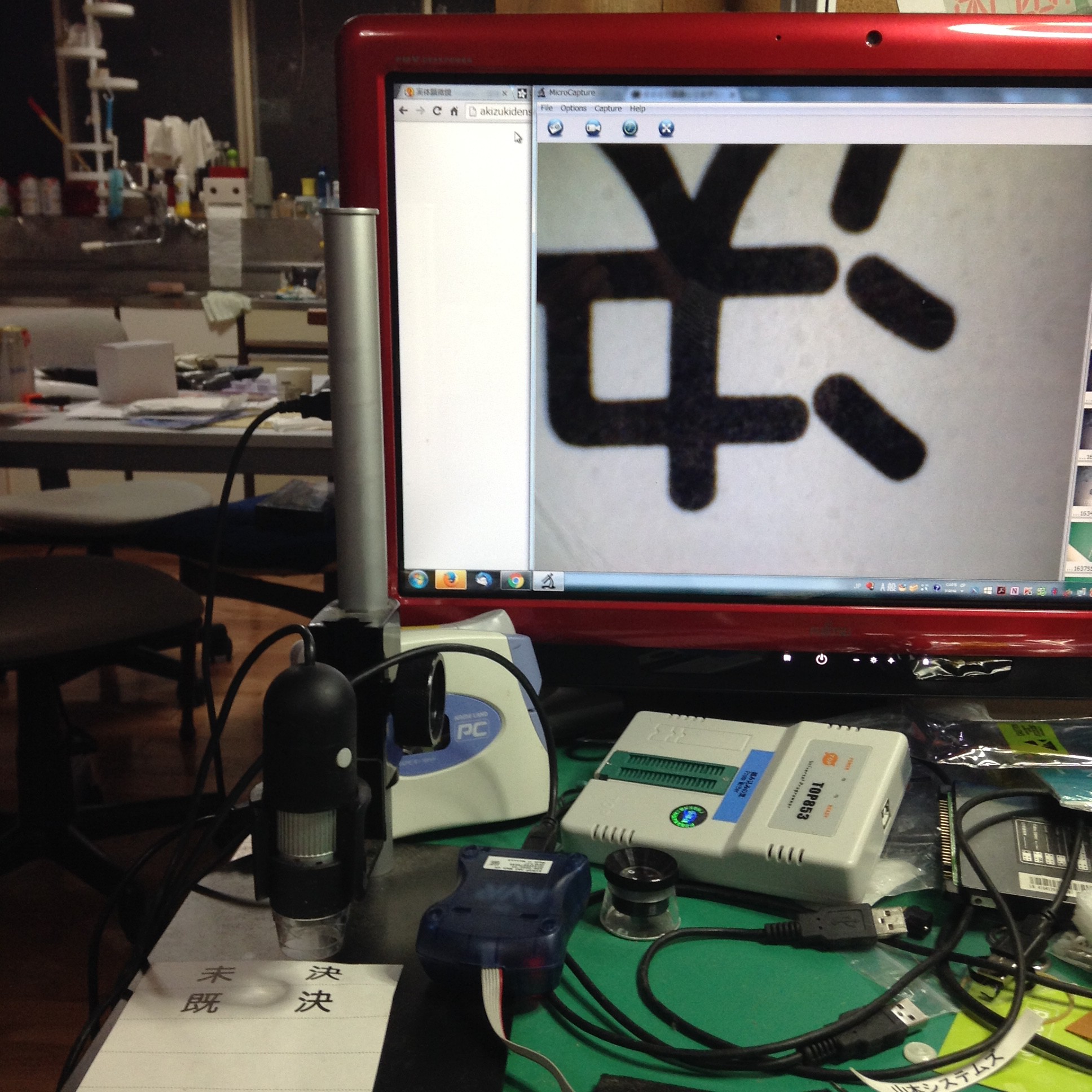
MicroCaptureのRotate設定で90度単位で回転できるのです。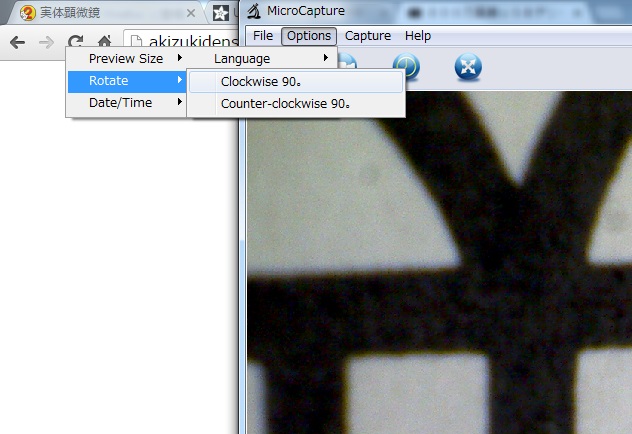
すなわち、二回回転させると180度周り正立するのです。
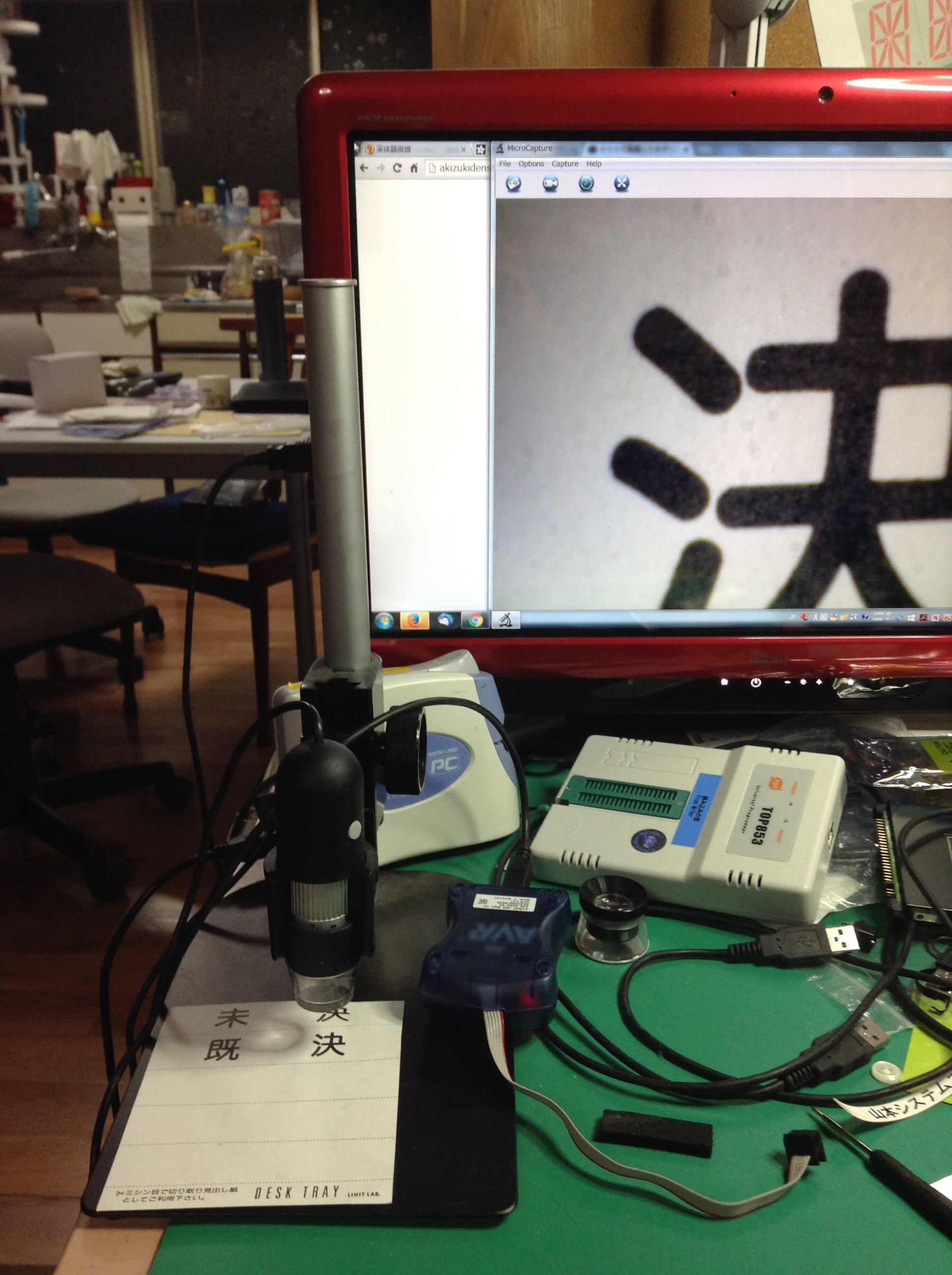
ちなみに、里で使っているスタンドは、Amazon.comで扱っていたMS35Bというモデルです。
今は、もっと安くてよいものがあるようですね。
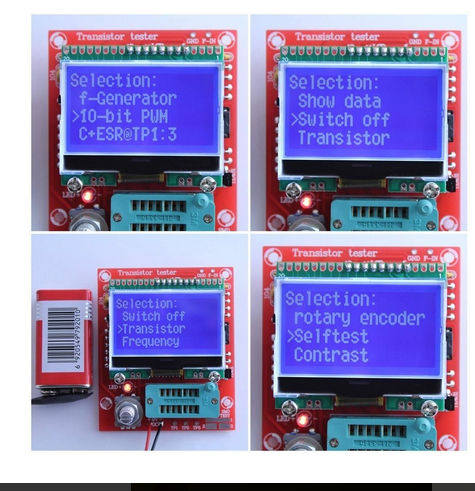

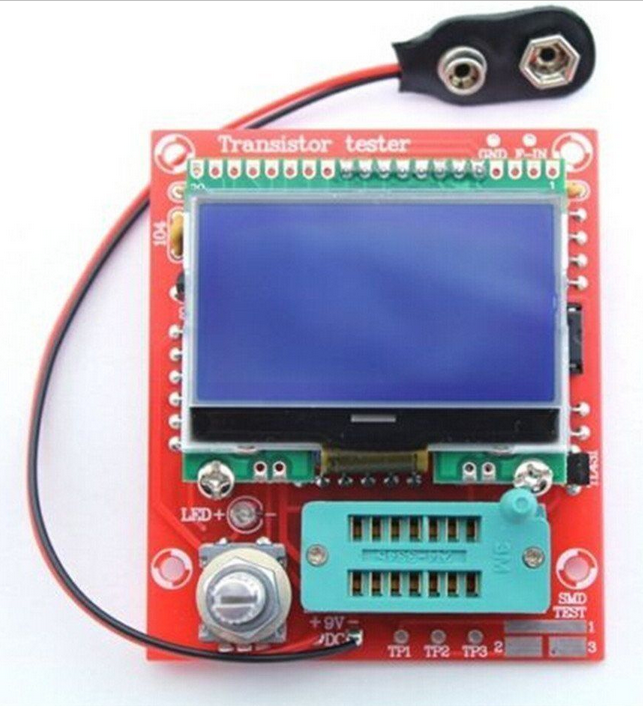
中華測定器キットです。
機能は多彩で、トランジスターなどの判定と測定、LCRの測定も可能です。
2MHzまでの方形波発振器にもなります。
9V 006Pの電池駆動です。
@3000です、説明書は幸いにして英語でした。ケースなど整備します。
3D Printer Robo3D の故障

第一発見症状
X resetで止まらない retryの末に最終的に止まった?
確認項目 12/12
2) MOTORドライバー基板のX軸の調整値をいじりながら反応をみる–> X軸の動作はスムーズに動かない。
3) RAMPSボードの目視確認–>NG Regulatorでコネクター接触部において一部溶融して接点ネジ困難
==>予備のRAMPSボードに交換、MOTORドライバーは付け替えで現状品を換装
MatterControl(制御ソフト)から確認
3) ATMEGAを切り分けで、交換したところ、シリアルポートがUbuntu(Linux1)側からttyACMxとして見えないという状態
–> Firmwareの書き換えが必要と認識して書き込み環境からNV, イメージを同一にすべく行ったが解決せず。
4) 同一品として認識していたATMEGA2560がチャイナ仕様でUSBがCH340だったことが判明。オリジナル版は、ATMEGA16UがUSB処理として搭載されていて、これはttyACMxとしてLinux側ではハンドリングされていた。–> CH340対応のカーネルドライバーモジュールを探索して、これをbuildしてinsmodして検知できたが、そのデバイス名は/dev/ttyUSBxとなった。Windowsと違ってデバイスのクラスがそこに見えてしまうのでアプリ設定が変更になる。
12/13 対応
1) 温度センサーがエクストルーダー側が計測できない。差し替えでRAMPSポートはOKなので、センサーサイドの抵抗を確認すると途中に作成した延長ケーブルで接触不良(断線っぽい)
–> 延長ケーブルの修理(圧着不良なのでそのラインのみ雌雄の端子を圧着した別の線を作成してハウジングに挿入した)でセンサー系統は解決、以前発生していた温度計測が0とフリッカー表示していたのは、これが原因だったらしい。
head温度のループ制御が崩れると制御不能に陥るので、これは肝心
2)次に各モーター制御を確認するのだが、モータードライバの調整について要調査だ。
年が明けての報告 1/5
突然モーター制御が一切動作しなくなった。切り分けとしてはMatterControlのメニューからのヒータープリセットと、その温度設定に伴う温度センス報告は正しく期待通りに動くのだが、モーター制御でX,Y,Zの各軸の移動指示が動作しない。RAMPSシールドやATMEGAの組み合わせや搭載すべきFirmwareのイメージ書き換えなどでも解決しない。
構成しているハードウェア結線側の確認を逐一行なったが不確実なQIコネクター箇所などの発見程度で現在の問題解決にはつながらず、将来の問題予防にはなったが・・・。
ハードウェアの組み合わせ変更を行い試験を続けたが、進展を見ないまま新年を迎えた。MatterControl以外の環境は現在は搭載していないので旧環境ReptierHostを搭載しなおしてみるかと思っていた。MatterControlの画面に残っている印刷Queueが気になり、何気に消していった。消し切ったところで、ヘッドの位置制御のコマンドが動作しはじめた。
使っていた印刷クライアントソフトの問題だった。このMatterControlは、印刷Queueが残っている限りは、印刷に関係するヘッドの位置制御などが出来ないということに思いが至った。
新しい、カードにしてしまっていたので各軸の制御を確認していき、Z軸の駆動能力が足らずにいることが判明したのでドライバー基板のポテンショメーターを時計回しにして増やしていき解決に近づくのを見つけかかった時に、煙が上がった。ドライバー基板が能力を超えたようだ。Z軸は二つのモーターを駆動する設計なので無理があるようだ。使っていない第二Extruder用のドライバー基板と差し替えて調整をして動作に至った。
クライアントソフトのスレッドで確認手順について問い合わせを早めにしておけば、よかったと悔やまれる。
3Dプリンターで昨夜、出力をしていたら朝になって途中でおかしくなっていた。
確認したところコマンドが正しく通らなくなっていた、コントロール側からみるとX軸のリセットをするとセンスが正しく動いていないようだった。切り分けを進めるとセンススイッチに問題はなく、どうもシステムとしてFirmwareが正しく動作してないようだった。いったんリセットスタートをCliantのUbuntuも3Dプリンターともに行うと、ATMEGAの本来動作すべきUSB動作が正しく立ち上がらない状況が起きていた。「/dev/ttyACM0」がUbuntuからは見えていないという状況だった。
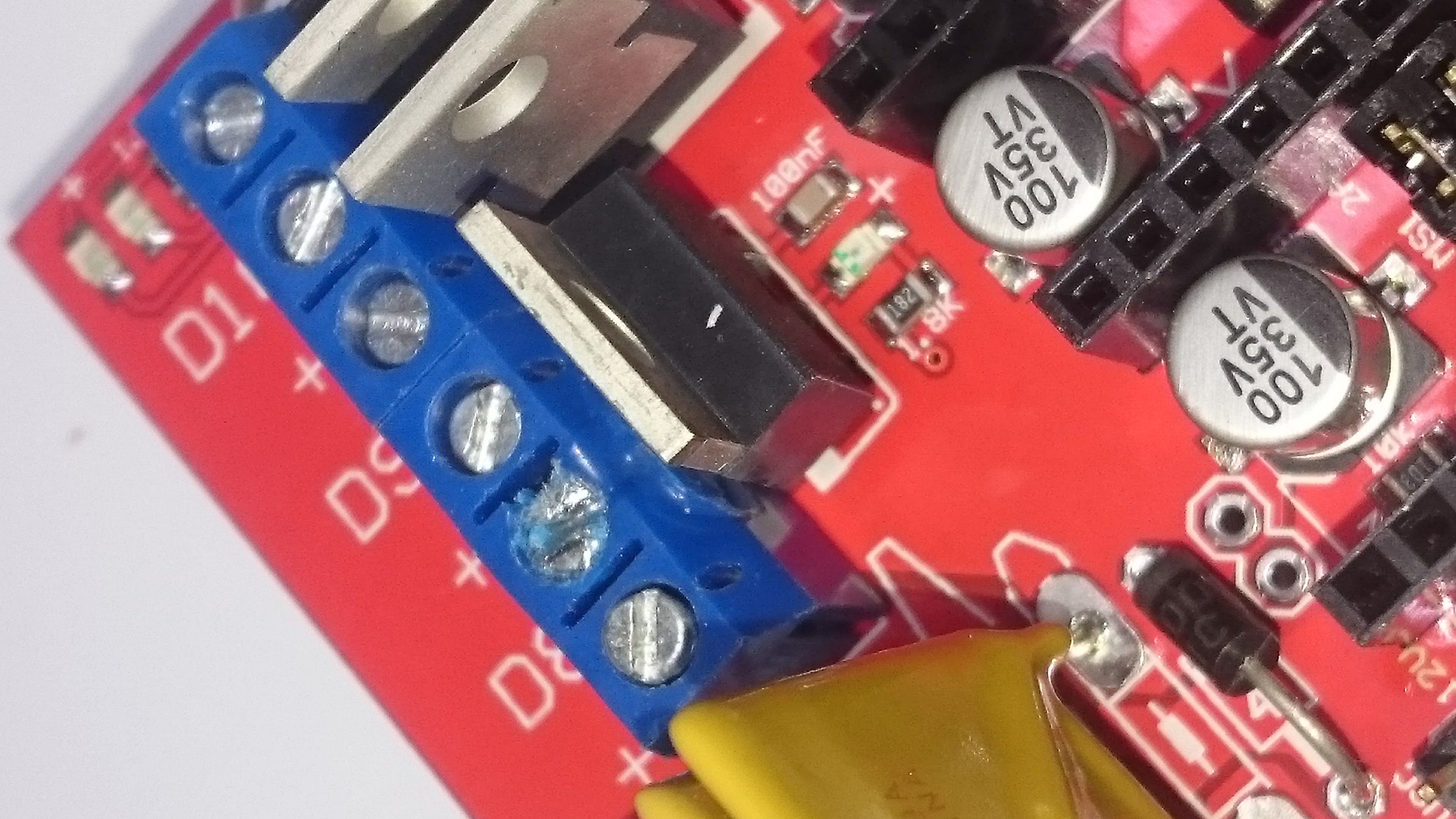
RampsシールドとATMEGAを取り外してみて、ATMEGA単体では動作しているようで/deb/ttyACM0が見えているのだが、シールド込みではおかしくなるようだった。シールドを交換してみようとすると、取りついているターミナルの一つがうまくネジが回らない状況だった。よくみると、ターミナルに当たっていたレギュレータでターミナルのハウジングが溶けていた。
交換した予備のシールドの当該箇所を見てみると、放熱器をつけているではないか。レギュレータが壊れたのかどうかの確認は、後にして、まずは交換した。動作していたモータードライバのモジュールはすべて換装しなおした。