iPhoneやAndroidと繋ぐ最も簡易なインターフェースはイヤホンジャックです。4極のマイク兼用で双方向通信が実現できます。オープンソースで提供されていますが、スイッチサイエンスの取り扱いで製品も入手できます。4極のジャックとSMD部品実装済み基板です。ご依頼のあったものですが、里でも在庫いたします。@1023
12/23の開講予定をキャンセルさせていただきます
祝日の開講予定でしたが、都合がつかなくなりましたのでキャンセルさせていただきます。申し訳ございません。
中華RTCモジュール届きました
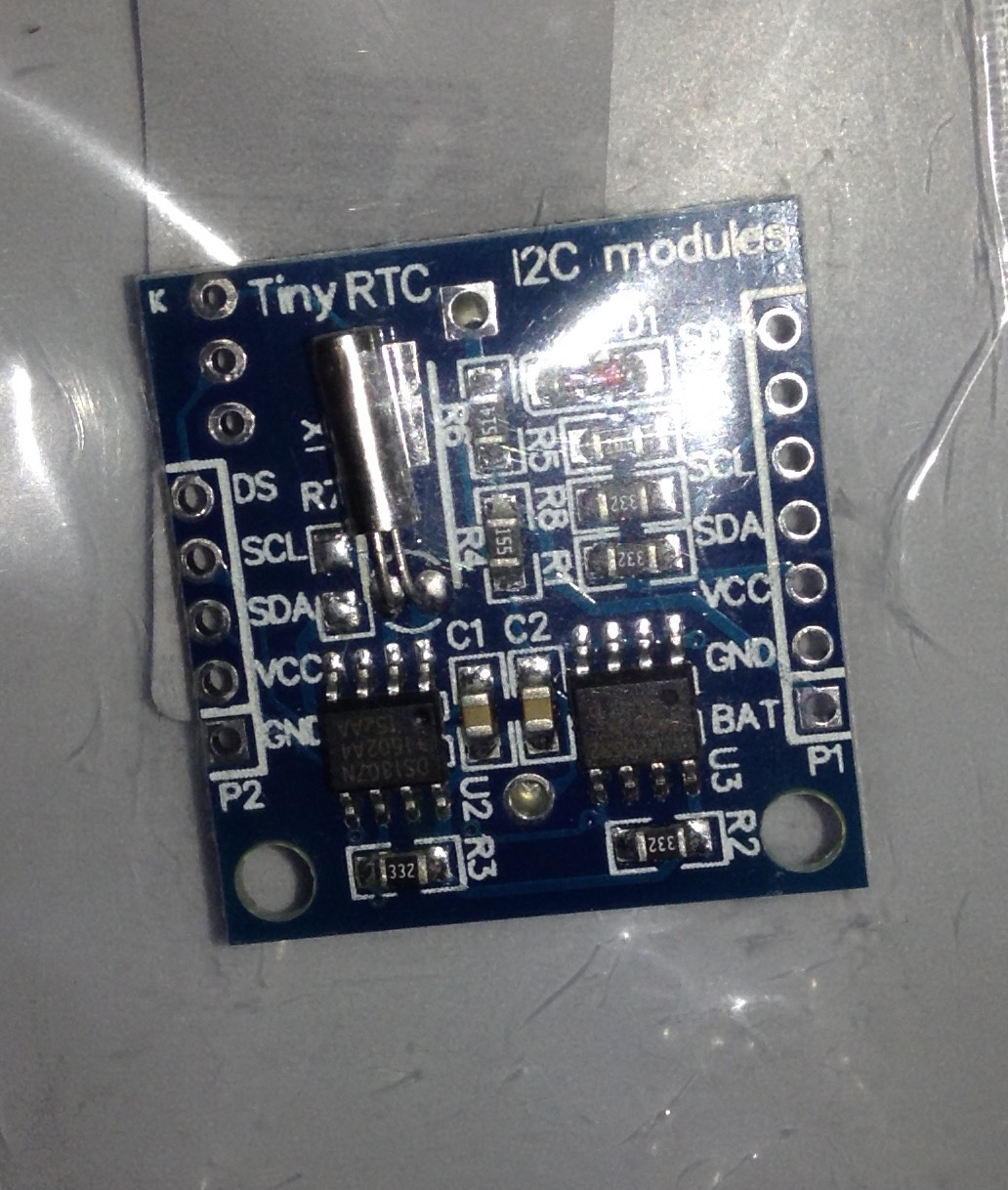
DS1307搭載のRTCモジュールです。裏側にコイン電池のソケットが付いています。
I2CでArduinoなどに接続できます。内蔵RAMは56バイト。
単価@200です
貼りつける基板サポート部品

2.5cm角のパーツです。秋月電子の取り扱いに掲載されていましたので、早速入手しました。3DプリンターなどにRaspberryPiを内蔵させたりするのに便利でしょう。
裏には強力な粘着テープが付いています。
単価@60円
少しだけ追加しました

半田付けは、おろかブレッドボードでのジャンパー挿しもいらない環境が少しだけあります。マグネットで接続する構造で電子工作の不思議を体感してもらうというのが目的ですが、カスタムブロックを開発するキットも入手しました。
Robo3D Auto Level 改造メモとか
Lead Screwの更新でZ軸の安定化とAuto Level機構が合わせてつけられるようになった。調整をしているのか、整備をしているのか、バグ取りをしているのか不明なのだが時間がかかった。まあ、二年ほど使ってきた3Dプリンターで今更ながらに原理機構について学ぶことがある。
Robo3Dは、RepRapというOpenSource/OpenHardの3Dプリンタープロジェクトの一つである。ABSとPLAの双方に対応していて、大きなサイズの印刷物が作れて安いということで登場した米国ベンチャー(KickStarterで立ち上げ)の製品だ。ABS樹脂のほうが強度がありそうだということで、このフィラメントをまとめ買いしたのだが安定に印刷するという目的で完成品を購入したつもりだったが、ABSは作成途上の温度管理が難しくオープンエアーな構造の機械では難しいらしく、おもにPLAを使ってきた。
3Dプリンターの調整で、めんどくさいのはヘッドを清掃交換したりした際に生じるZ軸のゼロ点調整である。紙や隙間ゲージを使って0.12ミリくらいのギャップに調整するわけである。その後のプリンターでは自動調整機構が搭載されてきたので、この機械にも入れることにしたというわけだ。
Auto Levelの肝は、従来の調整したポジションからどれだけヘッドを下げたら、当該センサーがシグナルを出すかということであり、その値を測定してプリンターの個体値としGコードで与えることだ。そのコマンドはM565で、今回は従来通りに隙間ゲージで最適となるギャップを設定しておき、そこから3Dプリンター制御ソフトでZ軸を0.1ミリ単位で下げていくということで割り出した。制御している側から見れば、信号がきた時点が、どれだけ先に行ってしまっているのかということになる。
最後の調整は、第一レイヤの引き回し具合で確認することになる。正しく押し付けて伸びた樹脂として引き回しが出来ていれば完了です。のしが足らない場合には、にょろにょろとした引き回しになってしまいます。その状態ではプリントが外れてしまいます。
設定データを、保存してしまえばマイクロスイッチの取り付けさえしっかりしていれば、あとは、プレートに様々なシートや糊を貼ってもチューニングされた出力が始まります。
調整中に気づいた改善修正項目メモ
1) 出力ヘッドの取り付けボルトの二組のうち、一つがなくなっていた。
これで印刷がぶれていた可能性がありました。–>修正済
2) 背面にある電源スイッチとインレットがおれていました。–>同様なものを手配しました。立てかける時には、必ず電源ケーブルを抜きましょう。
3) 何度かMatterControlの画面で温度表示が0と表示値を繰り返す現象がおきた。–>要調査
Arduino Megaのリセットを行い復旧はした。
4) Z軸のモーターを変えたことでmotorドライバーの出力が不足して振動するのみとなった。–> 当該のモータードライバー基板のポテンショを右回しして出力を増やすことで動作した。モーターでばらつきがあるというよりも、プリンター側のメカが変わったので必要なトルクが増えたということだろう。
5) AutoLevelのセンサはマイクロスイッチなのだが取り付けのM2のネジが効いていない気がする箇所がある。ロック処置が必要。
6) 5)がおかしくなった場合には、フィラメント出力が止まってしまう可能性があるが、位置が下にずれてフィラメントが出なくなった場合には、エクストルーダーのドライブギアの切り込みでフィラメントが削れてしまっているのでフィラメント送りが進まなくなっている。ヘッドの温度を加熱設定してフィラメントを手操作で押しだすことで解消する。

Arduino用のユニバーサルシールド基板
Arduinoで周辺I/Oを作りこんだりするカスタムシールド作成用の基板です。
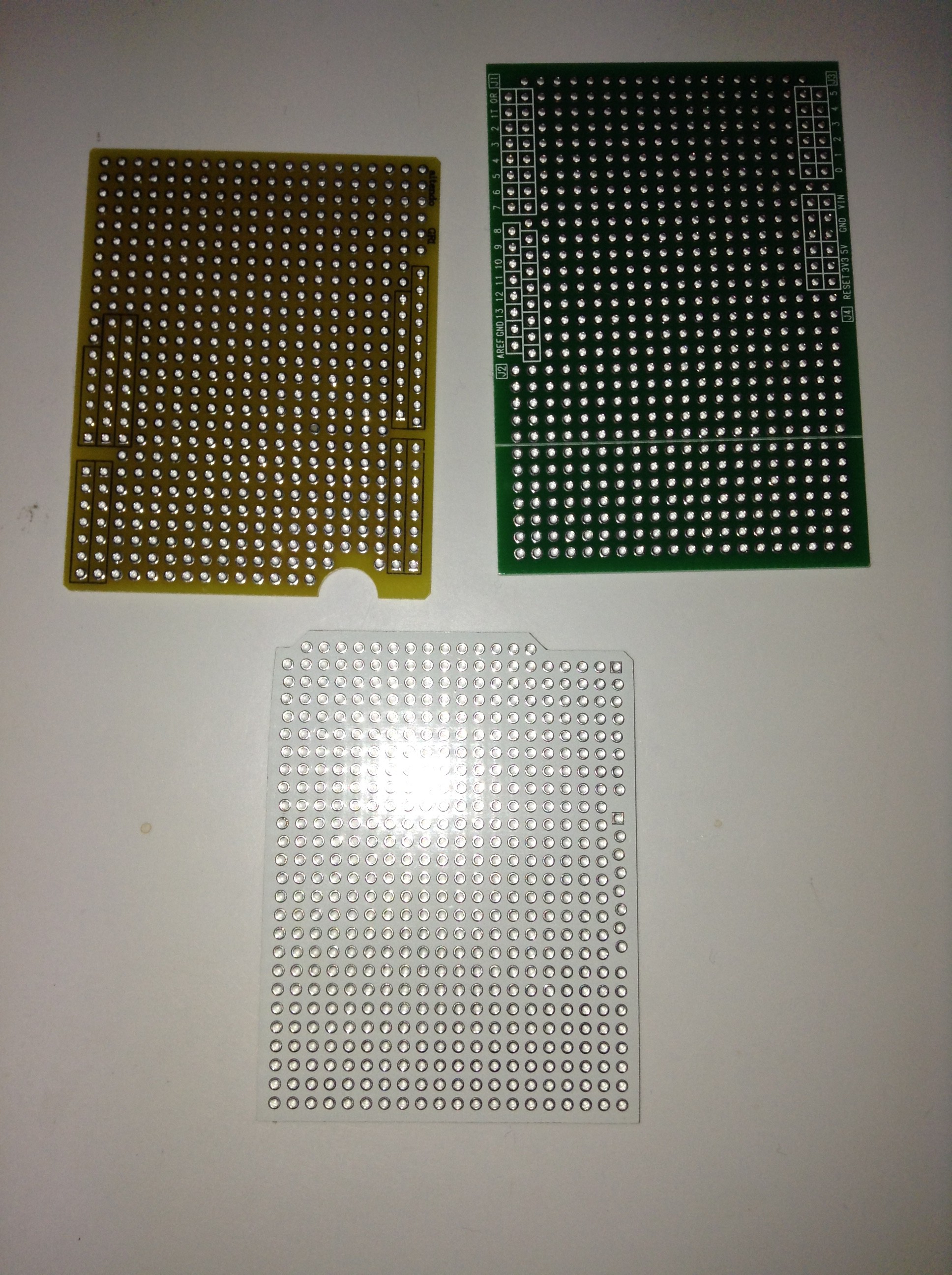
UNOに形を合わせてある下側の基板はスイッチサイエンスのバニラシールド@400
右上側の基板は秋月電子取り扱いの基板@200(なお赤基板が割安とのことです)
左上側の基板はAitendo取り扱いのシールド作成基板@200
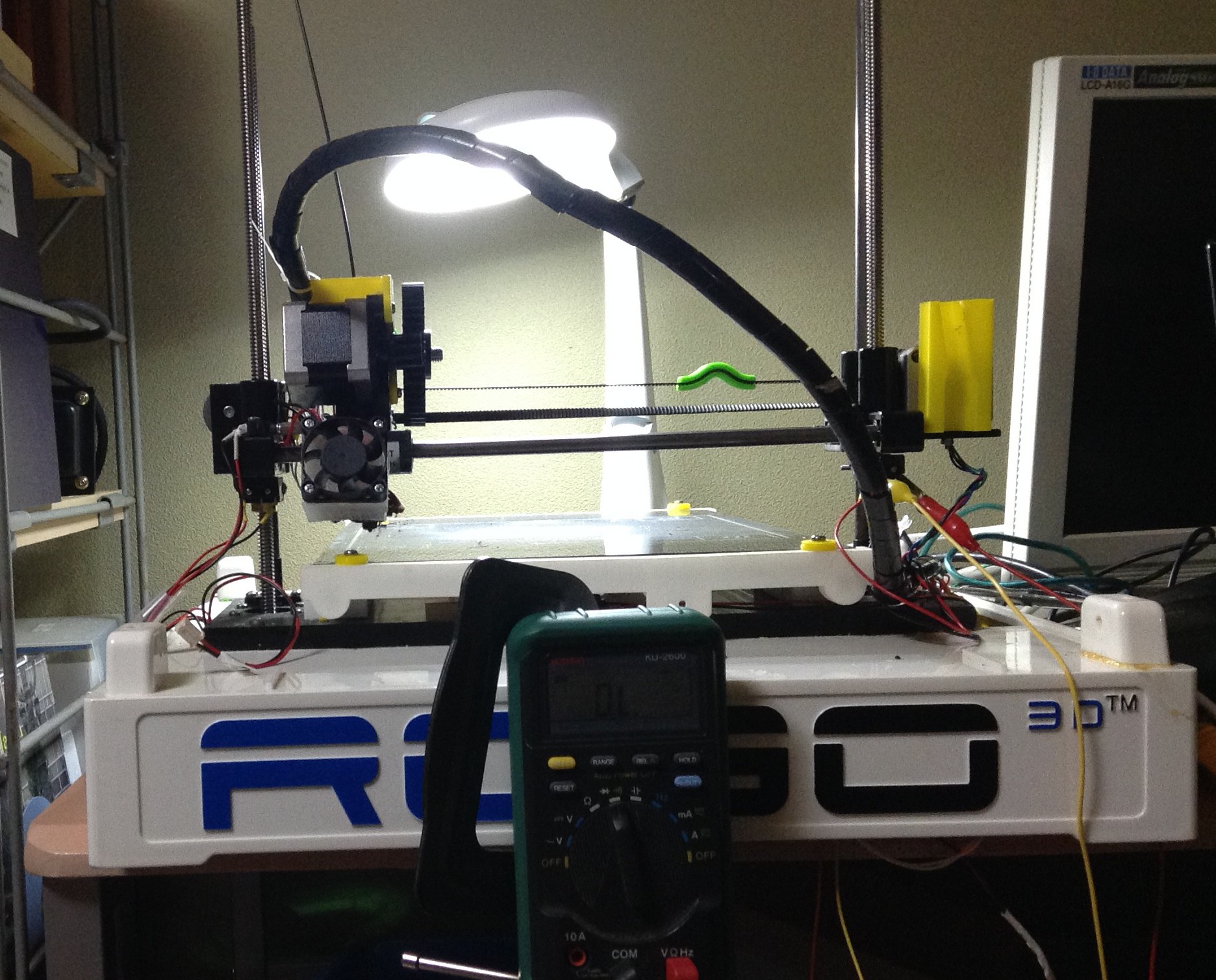
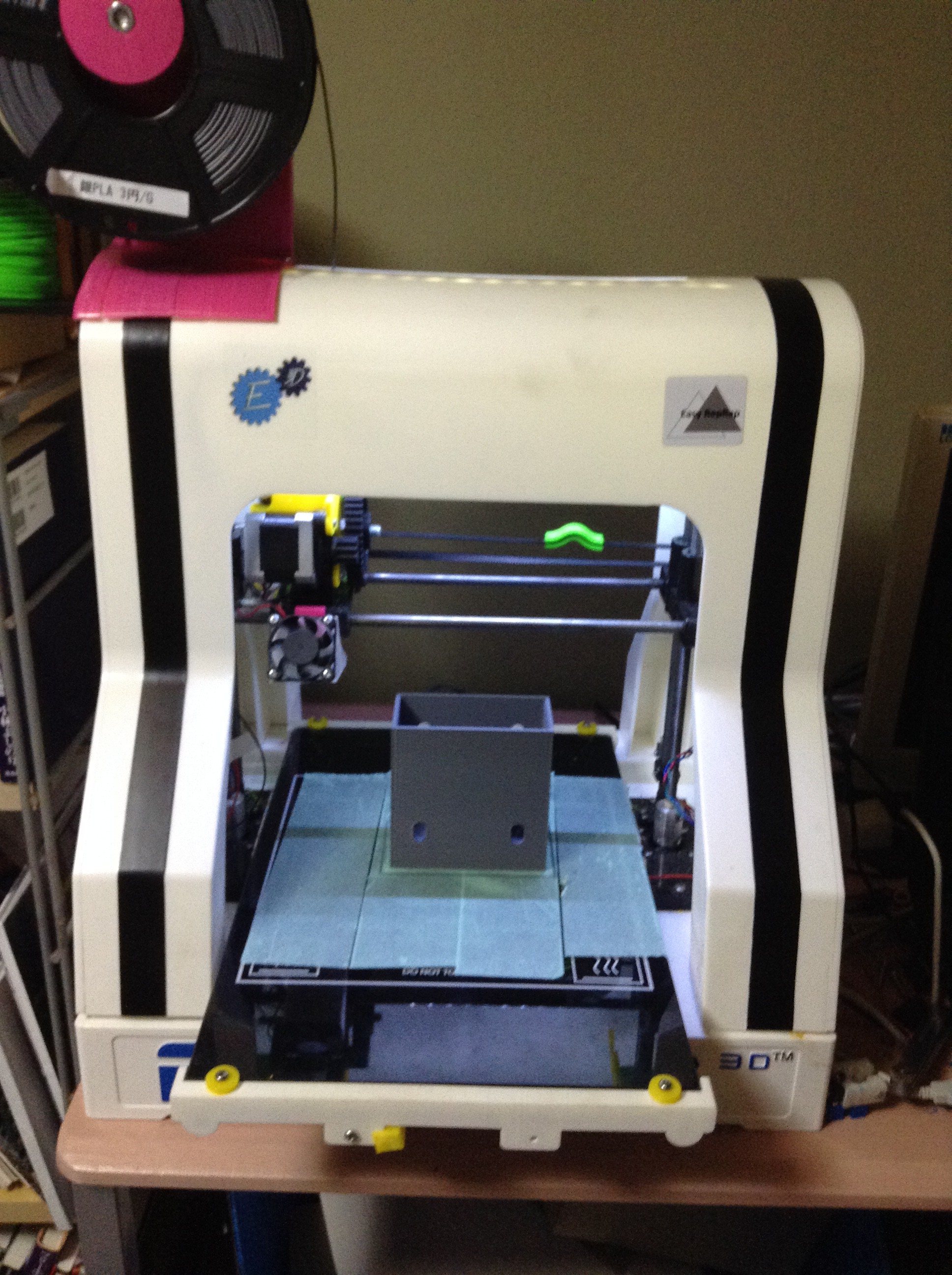
3DプリンターにAutoLevel設定機構を追加しています
里に設置している3DプリンターはKickStarterでスタートしたモデルで現在は進化したものが製品化されていますので、出来るだけ製品に近い性能が出るようにupgradeを続けています。
以下の写真にあるようにプリントヘッドを支えているX軸(左右)のレールがZ軸のロッドで上下します。今回の変更で下側にマイクロスイッチが付けられています。Z軸(上下)のゼロ点設定が、ヒートベッド上のマルチポイントで測定されてテーブルやレールのひずみを補正するという動作になるそうです。
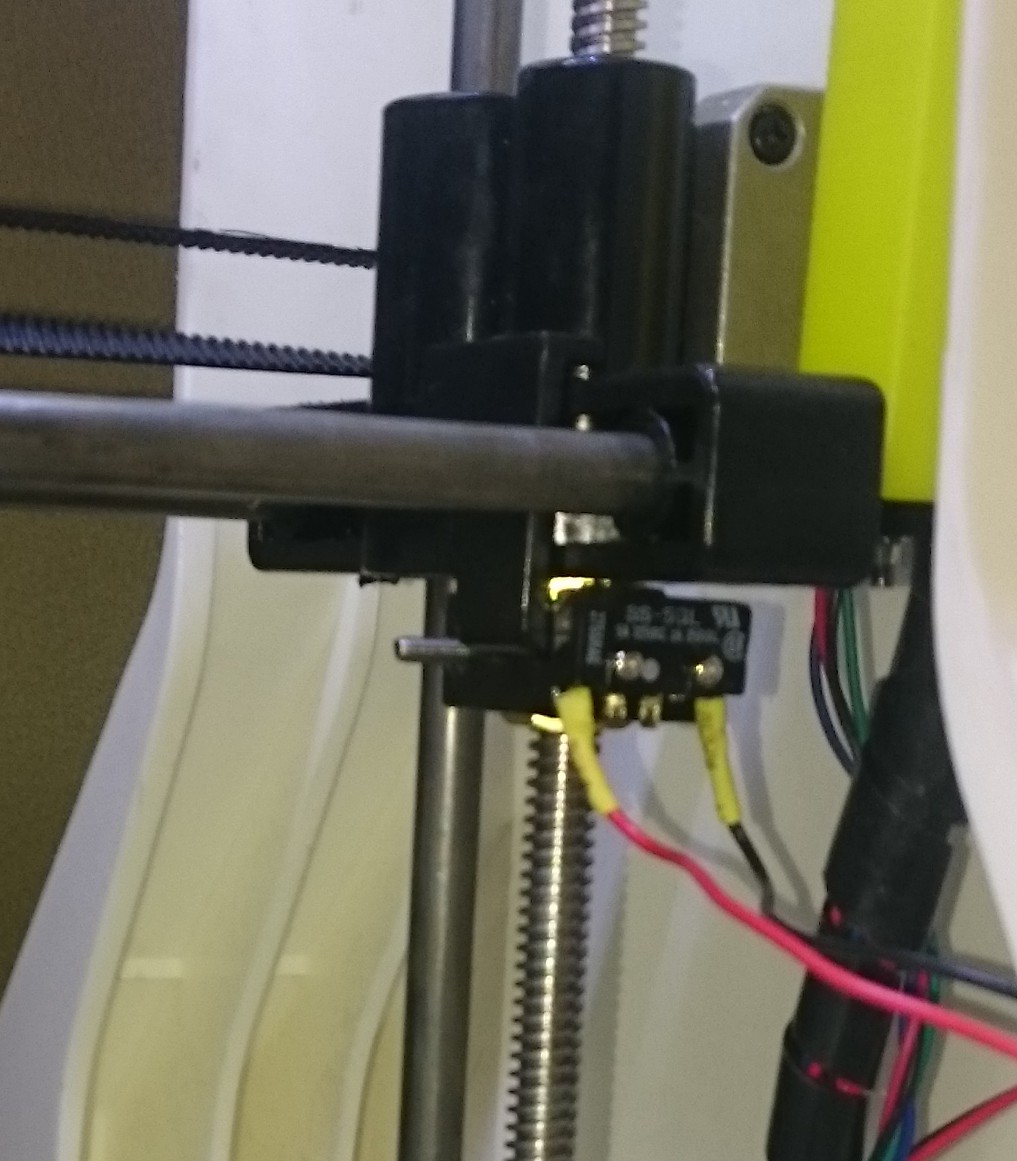
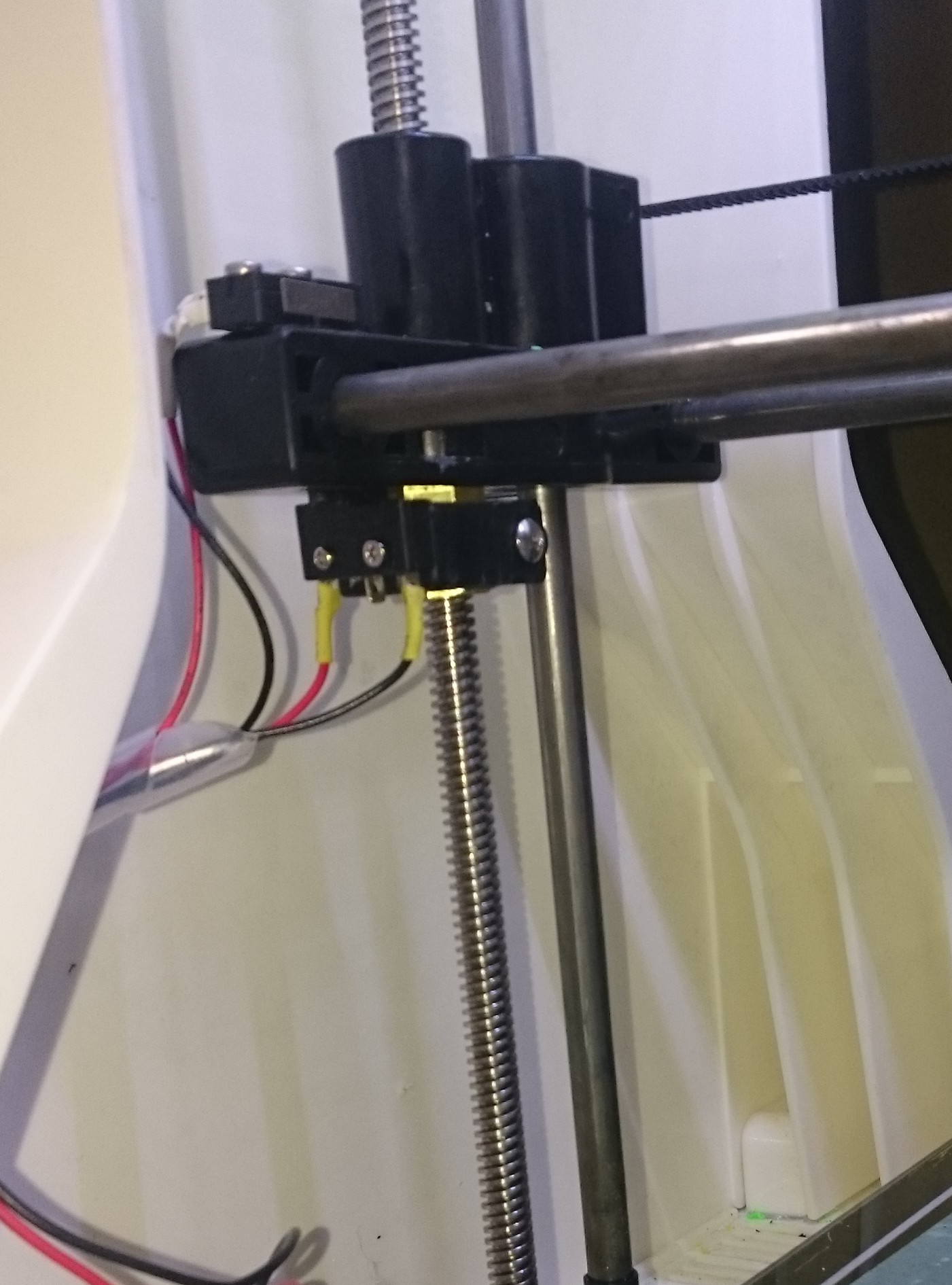
今回の修正では、Z軸のロッドが以下の写真のようなモーター一体型になりました。
また、カップリングナットがステージとセンサーの双方を上下に昇降させることになります。ヘッドがベッドに当たるとセンサーのみが下降することになりスイッチが入ることになります。

3Dプリンターの制御機構はATMEGA2560のArduinoが搭載されていて、これにReprap仕様のプリンター制御シールドが乗っています。Z軸のEndstp接点入力にこれら二つのセンサーがパラ付けで接続されます。どちらかの接点がメークすることで検知します。実際にステージの自重などでひずみも生じ左右での差異がでますので、この機構は正しいと思います。
3Dプリンターの制御はWin7ノートPCで実践してきましたが、Windows10への移行もありさらにUbuntuとの切り替えも含めて今日はUbuntu環境にもArduino開発環境とプリンタ制御ソフト(MatterControl)の双方をインストールしました。
3Dプリンターとの通信制御には250kbpsという速度設定が、当初は壁になっていましたが、この二年余りのLinux環境の進化で問題なく普通にインストールで動作するようになりました。次週には動作報告が出来るかと思います。
おまちください。
レーザーカッターの機構調整しました

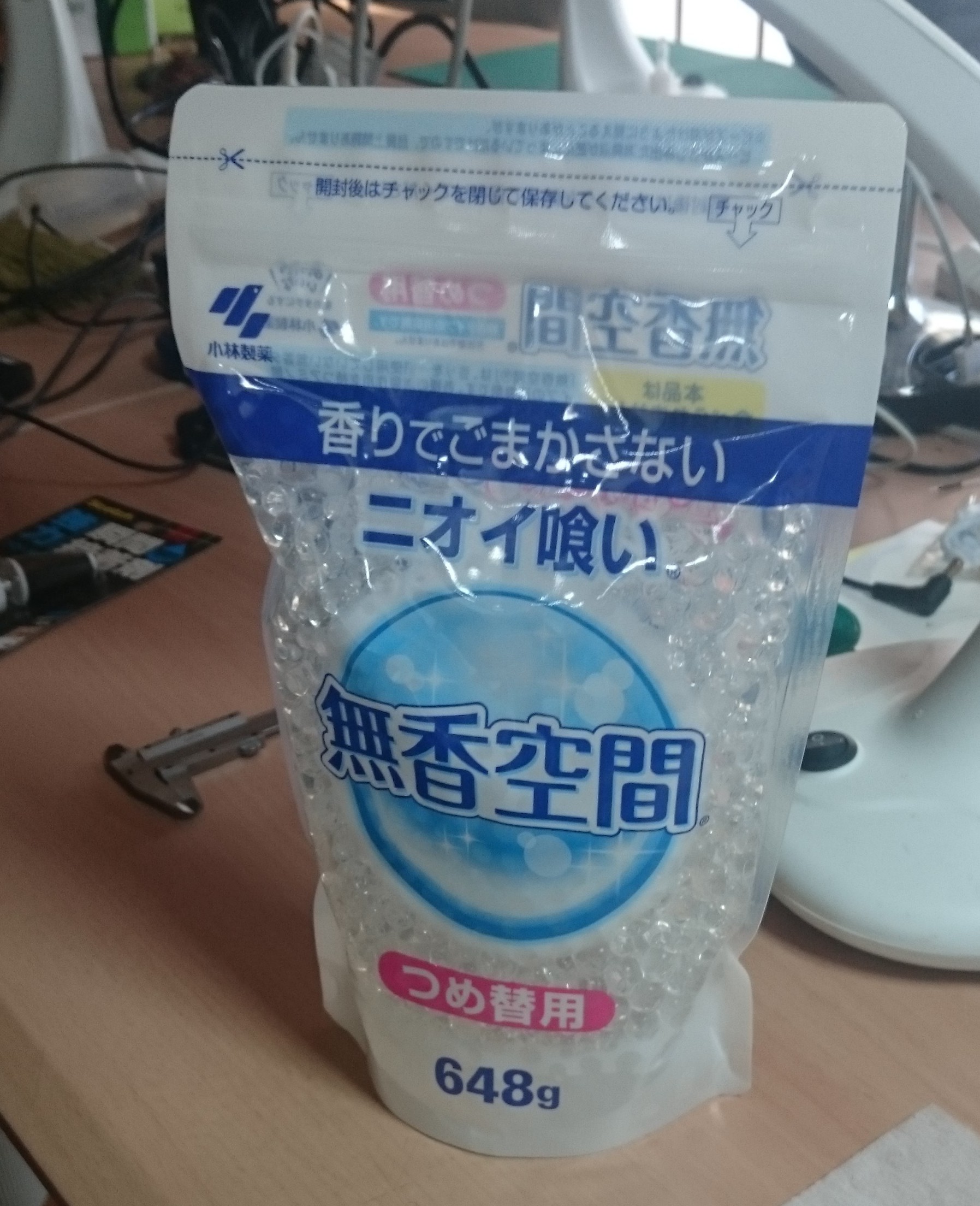
土曜日に作成したフィルターボックスには、消臭剤入りの袋を搭載しました。
半導体レーザーの保持部にゆるみがありましたので、ガタつきが起きていたようです。再度締め付けを行い、ガタをなくしました。ベルトのテンションについては再検討します。
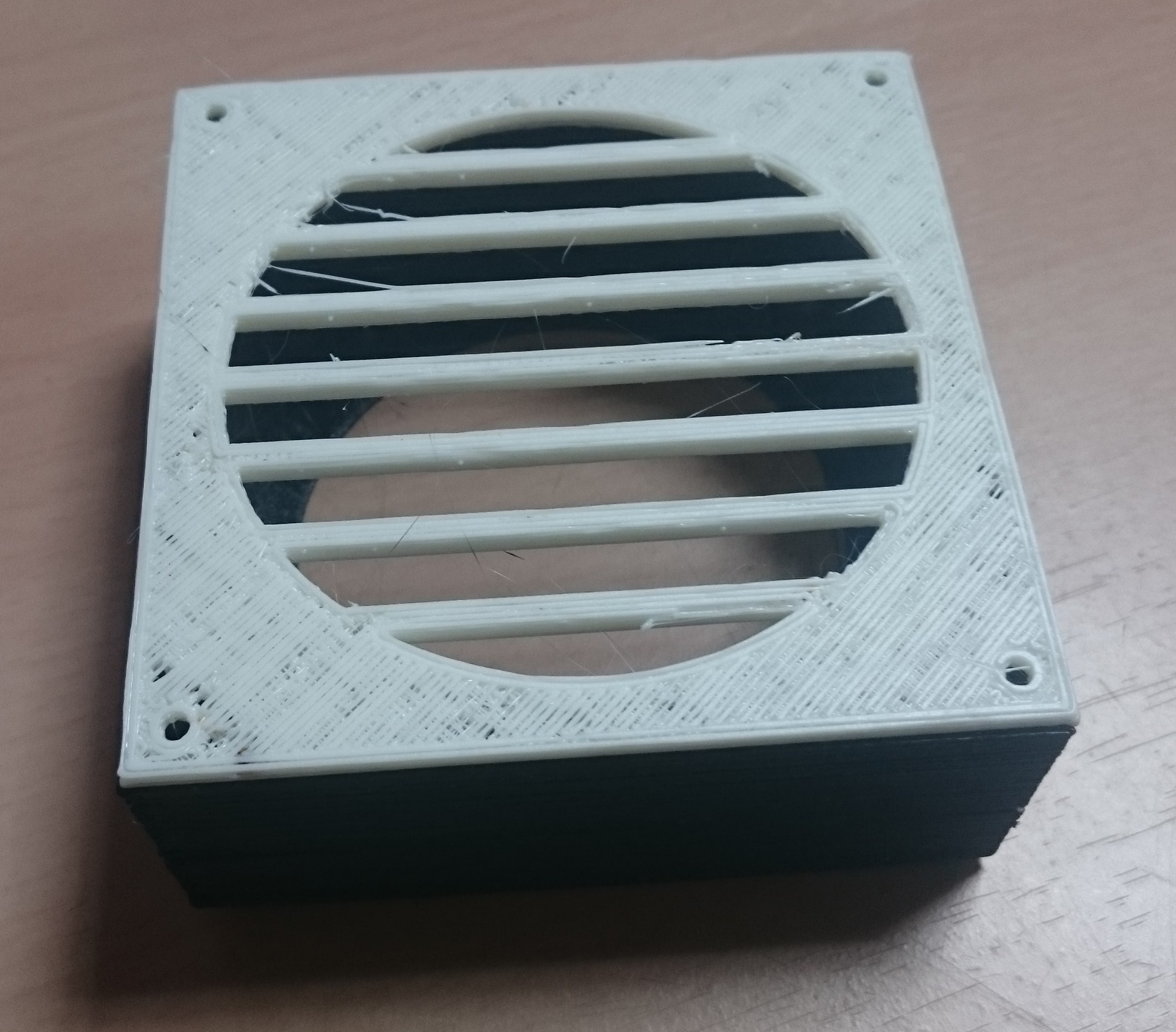
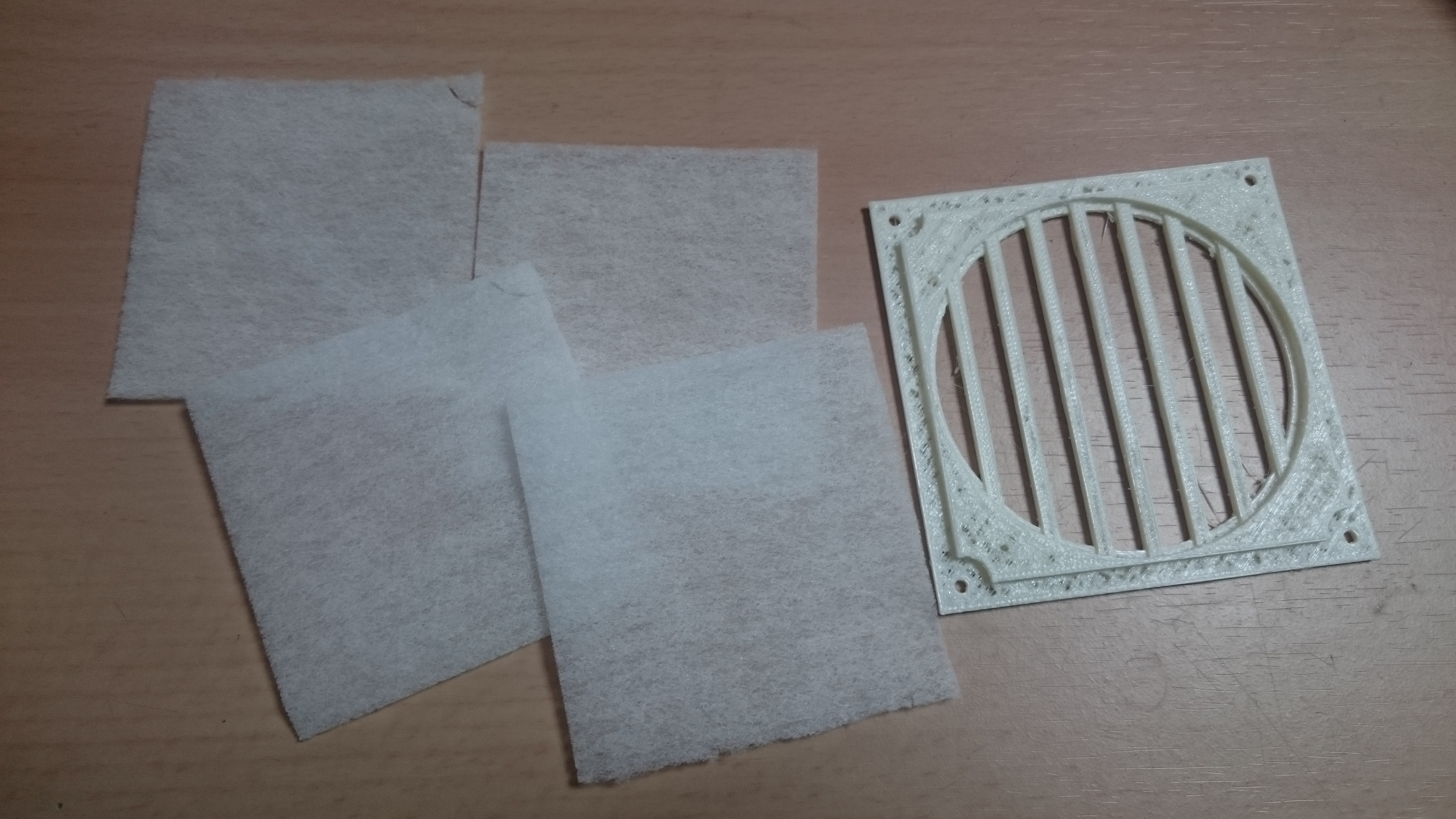
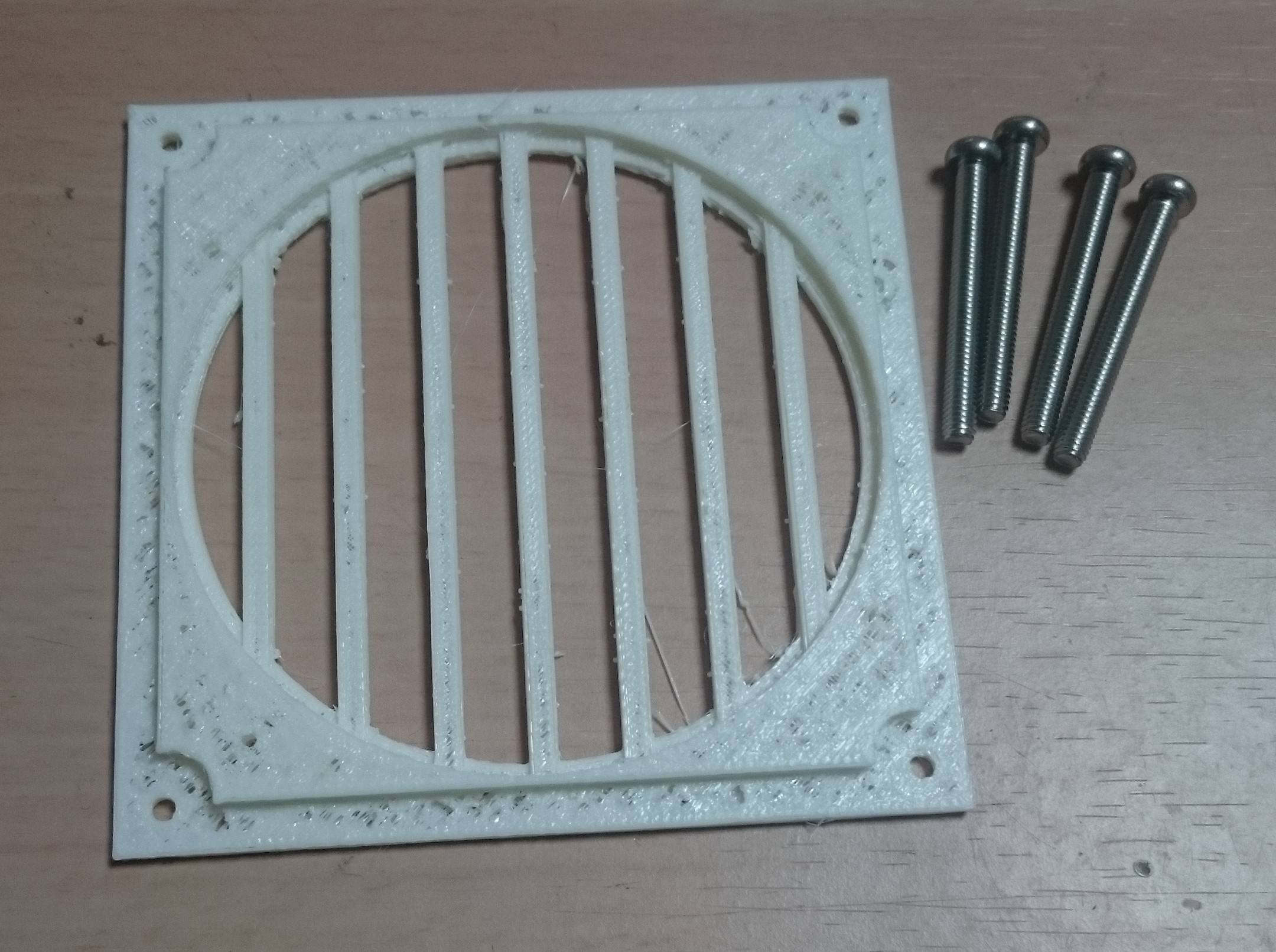
レーザーカッターに簡易脱臭機構を作成しました。
組み込みの里では、パワーは小さいもののレーザーカッターがあります。メカニズムとしては焼き切るので、臭いが発生します。縁側においてやるという意見もありますが、対策はとりたいと思います。簡易脱臭機構を3Dプリンターで印刷してみます。脱臭剤の粒を収納するポケットは、まだ印刷中です。ケースとフタは出来ました。簡便に、この箱にお茶の葉の袋にいれてまずは効能を確認します。珈琲豆の残渣を