
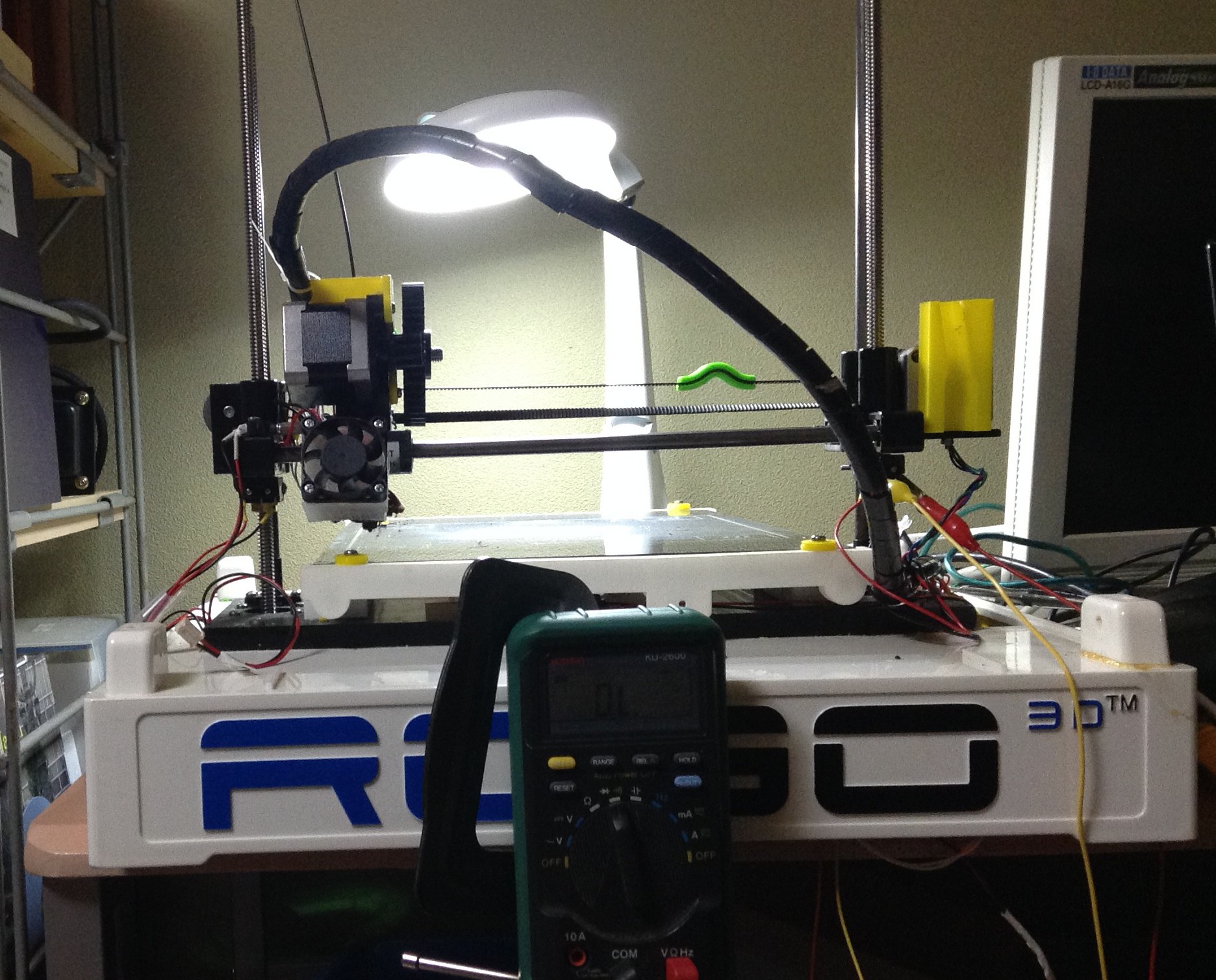
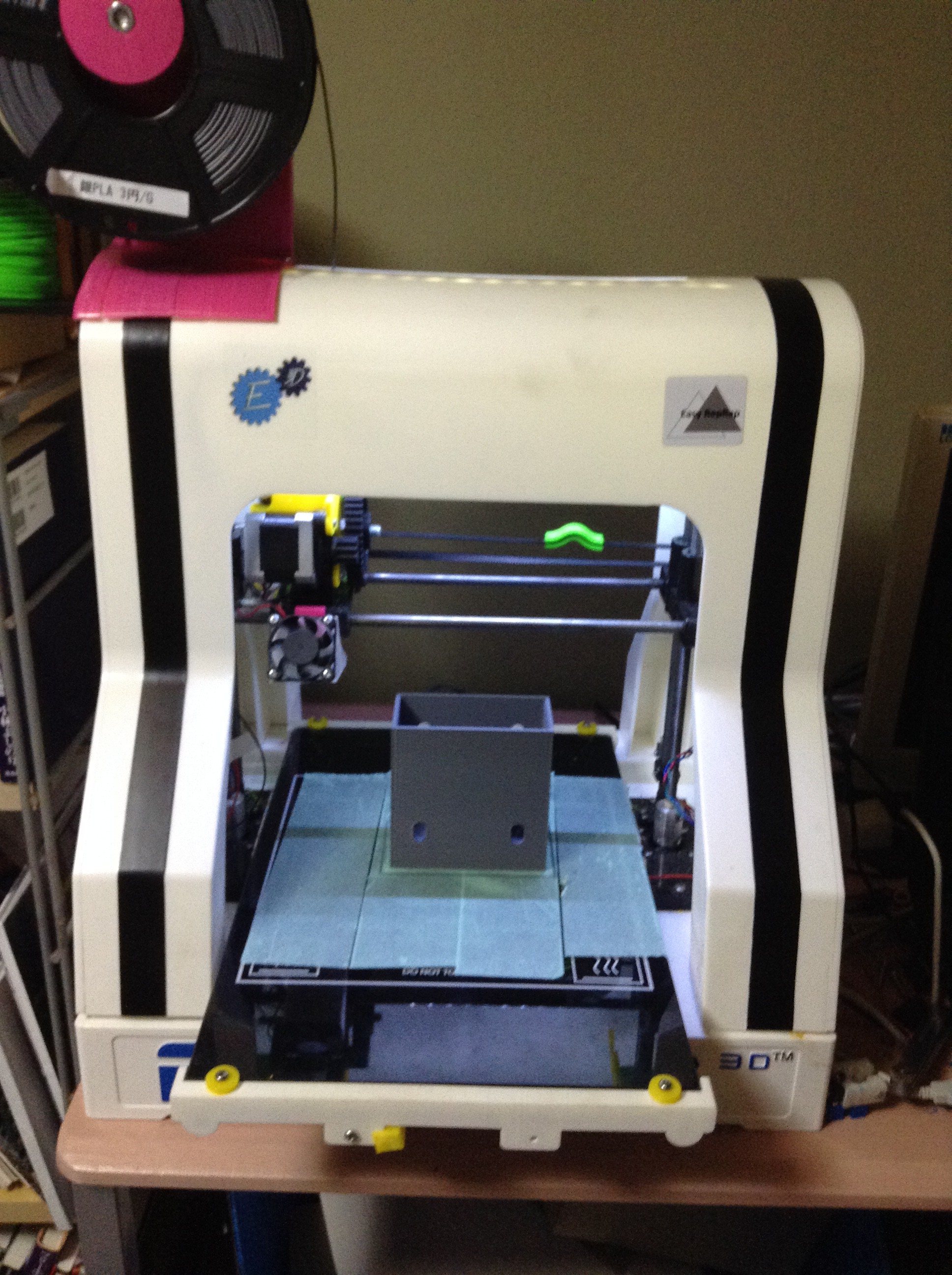
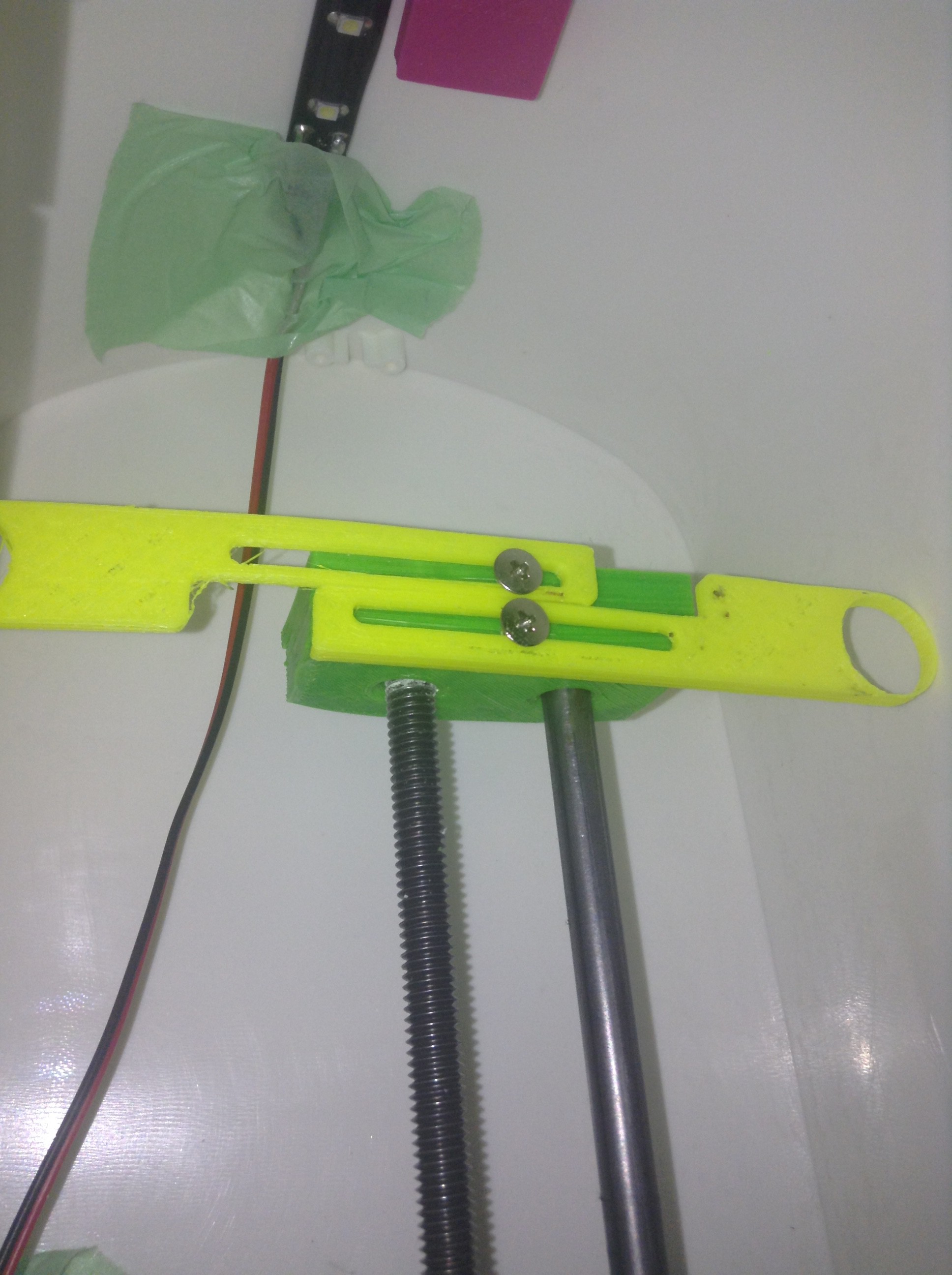
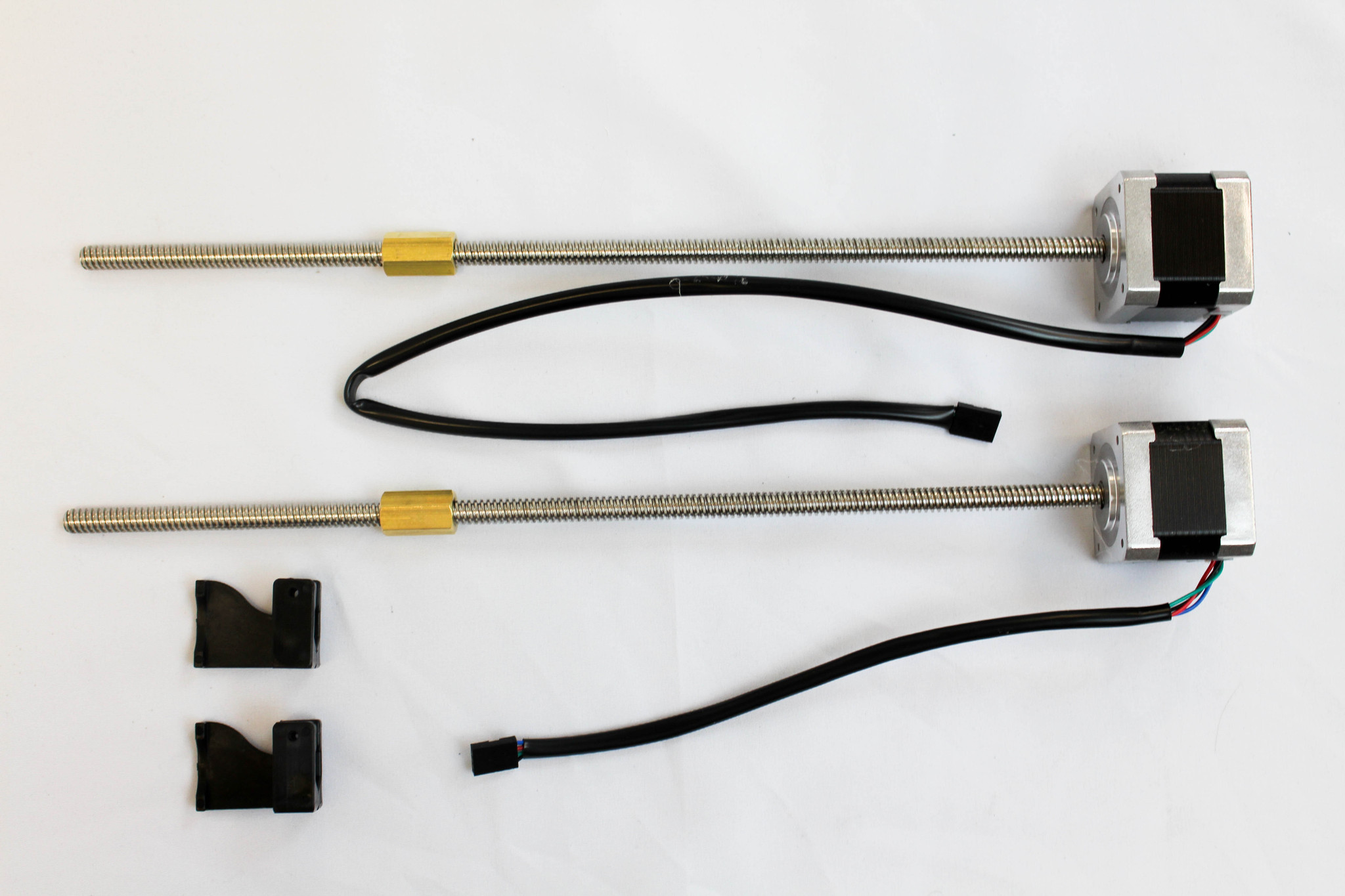
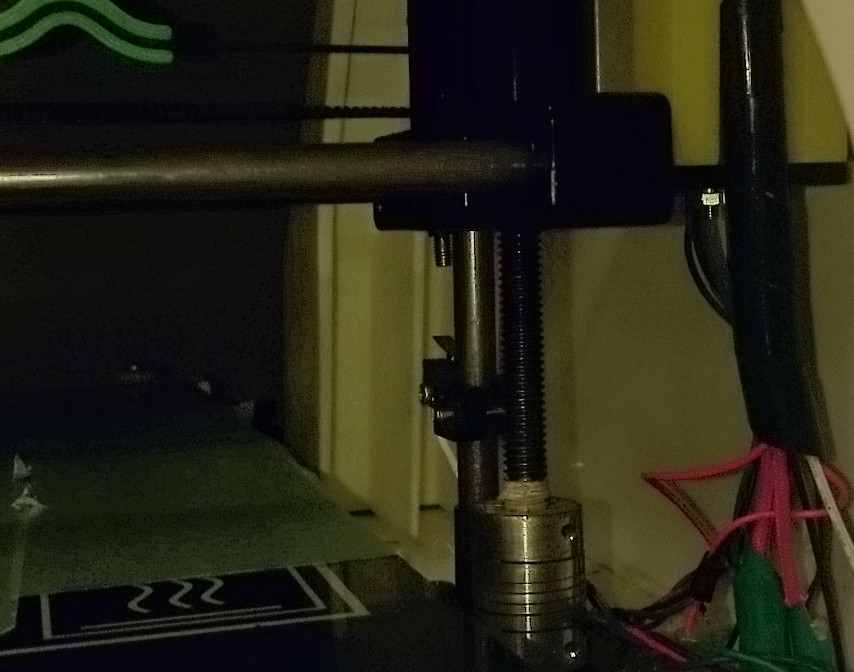
Lead Screwの更新でZ軸の安定化とAuto Level機構が合わせてつけられるようになった。調整をしているのか、整備をしているのか、バグ取りをしているのか不明なのだが時間がかかった。まあ、二年ほど使ってきた3Dプリンターで今更ながらに原理機構について学ぶことがある。
Robo3Dは、RepRapというOpenSource/OpenHardの3Dプリンタープロジェクトの一つである。ABSとPLAの双方に対応していて、大きなサイズの印刷物が作れて安いということで登場した米国ベンチャー(KickStarterで立ち上げ)の製品だ。ABS樹脂のほうが強度がありそうだということで、このフィラメントをまとめ買いしたのだが安定に印刷するという目的で完成品を購入したつもりだったが、ABSは作成途上の温度管理が難しくオープンエアーな構造の機械では難しいらしく、おもにPLAを使ってきた。
3Dプリンターの調整で、めんどくさいのはヘッドを清掃交換したりした際に生じるZ軸のゼロ点調整である。紙や隙間ゲージを使って0.12ミリくらいのギャップに調整するわけである。その後のプリンターでは自動調整機構が搭載されてきたので、この機械にも入れることにしたというわけだ。
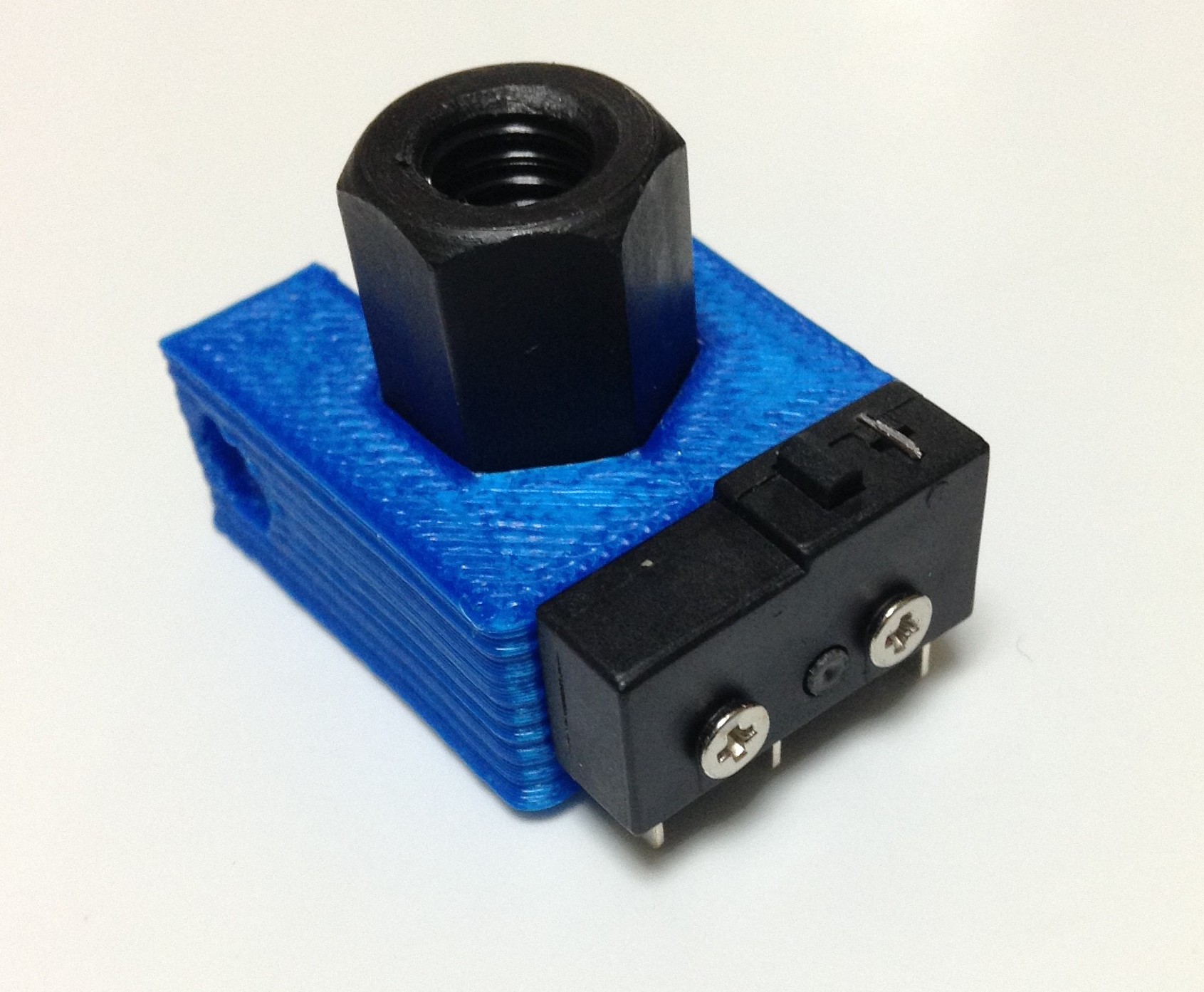
Auto Levelの肝は、従来の調整したポジションからどれだけヘッドを下げたら、当該センサーがシグナルを出すかということであり、その値を測定してプリンターの個体値としGコードで与えることだ。そのコマンドはM565で、今回は従来通りに隙間ゲージで最適となるギャップを設定しておき、そこから3Dプリンター制御ソフトでZ軸を0.1ミリ単位で下げていくということで割り出した。制御している側から見れば、信号がきた時点が、どれだけ先に行ってしまっているのかということになる。
最後の調整は、第一レイヤの引き回し具合で確認することになる。正しく押し付けて伸びた樹脂として引き回しが出来ていれば完了です。のしが足らない場合には、にょろにょろとした引き回しになってしまいます。その状態ではプリントが外れてしまいます。
設定データを、保存してしまえばマイクロスイッチの取り付けさえしっかりしていれば、あとは、プレートに様々なシートや糊を貼ってもチューニングされた出力が始まります。
調整中に気づいた改善修正項目メモ
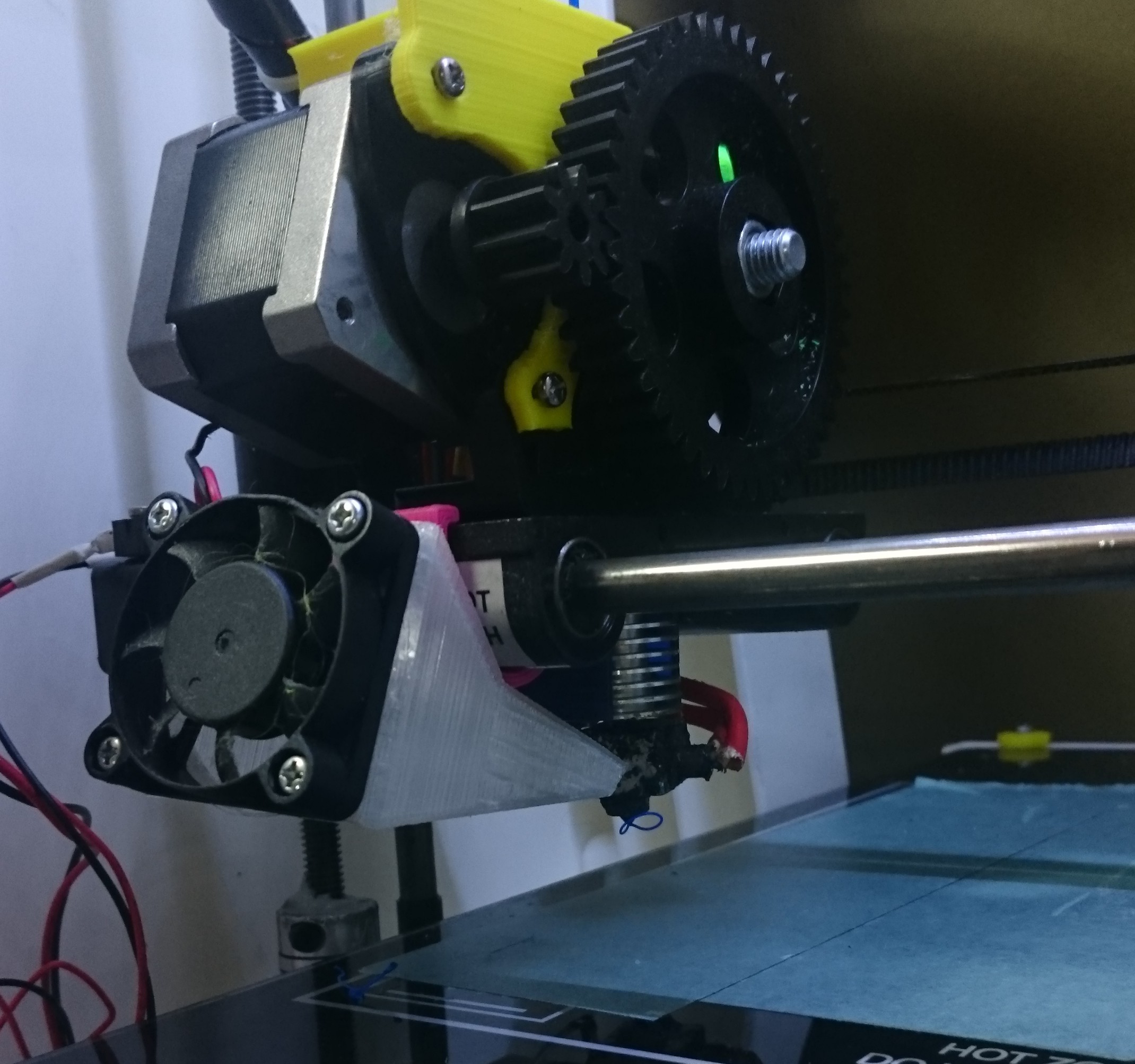
1) 出力ヘッドの取り付けボルトの二組のうち、一つがなくなっていた。
これで印刷がぶれていた可能性がありました。–>修正済
2) 背面にある電源スイッチとインレットがおれていました。–>同様なものを手配しました。立てかける時には、必ず電源ケーブルを抜きましょう。
3) 何度かMatterControlの画面で温度表示が0と表示値を繰り返す現象がおきた。–>要調査
Arduino Megaのリセットを行い復旧はした。
4) Z軸のモーターを変えたことでmotorドライバーの出力が不足して振動するのみとなった。–> 当該のモータードライバー基板のポテンショを右回しして出力を増やすことで動作した。モーターでばらつきがあるというよりも、プリンター側のメカが変わったので必要なトルクが増えたということだろう。
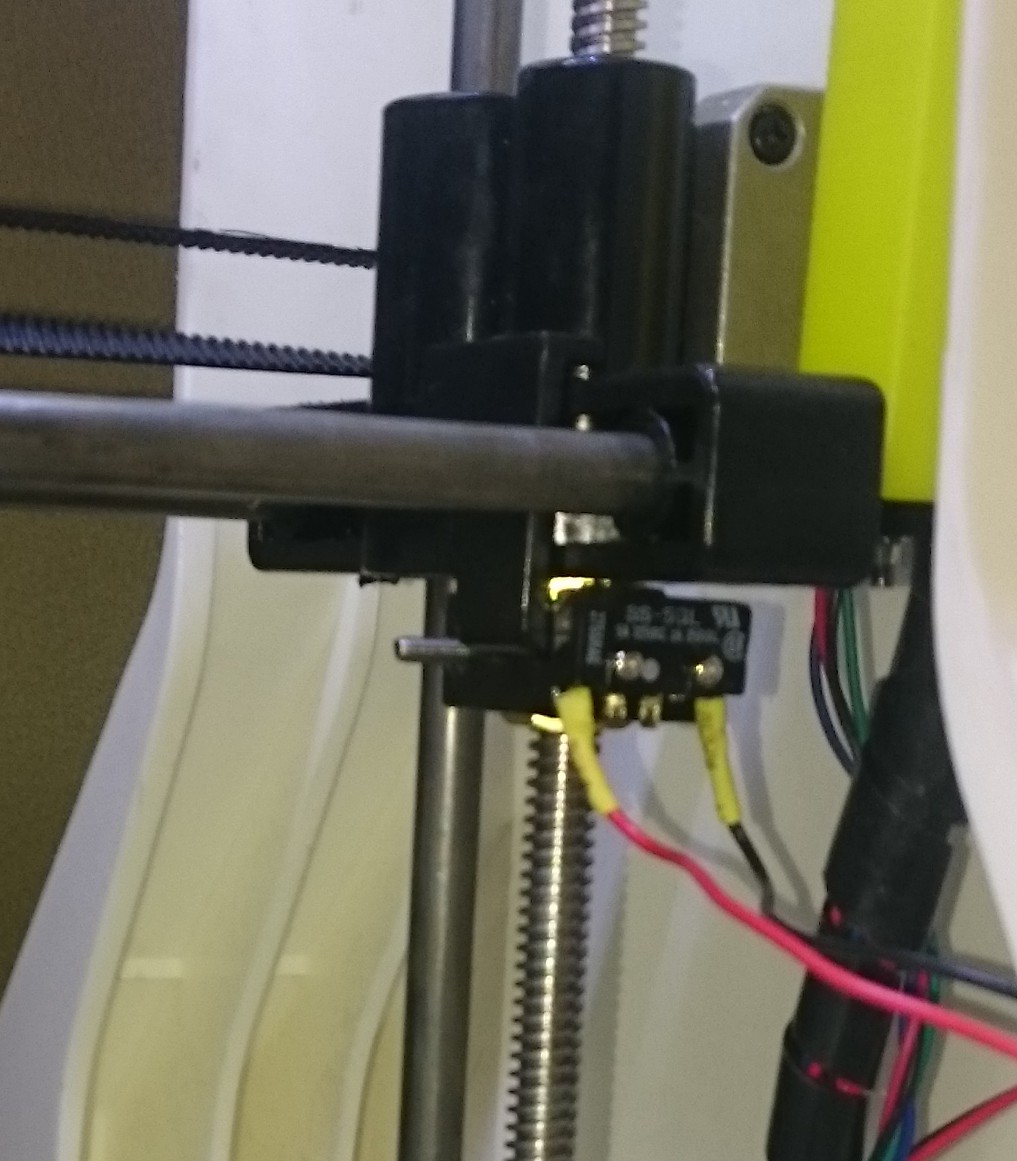
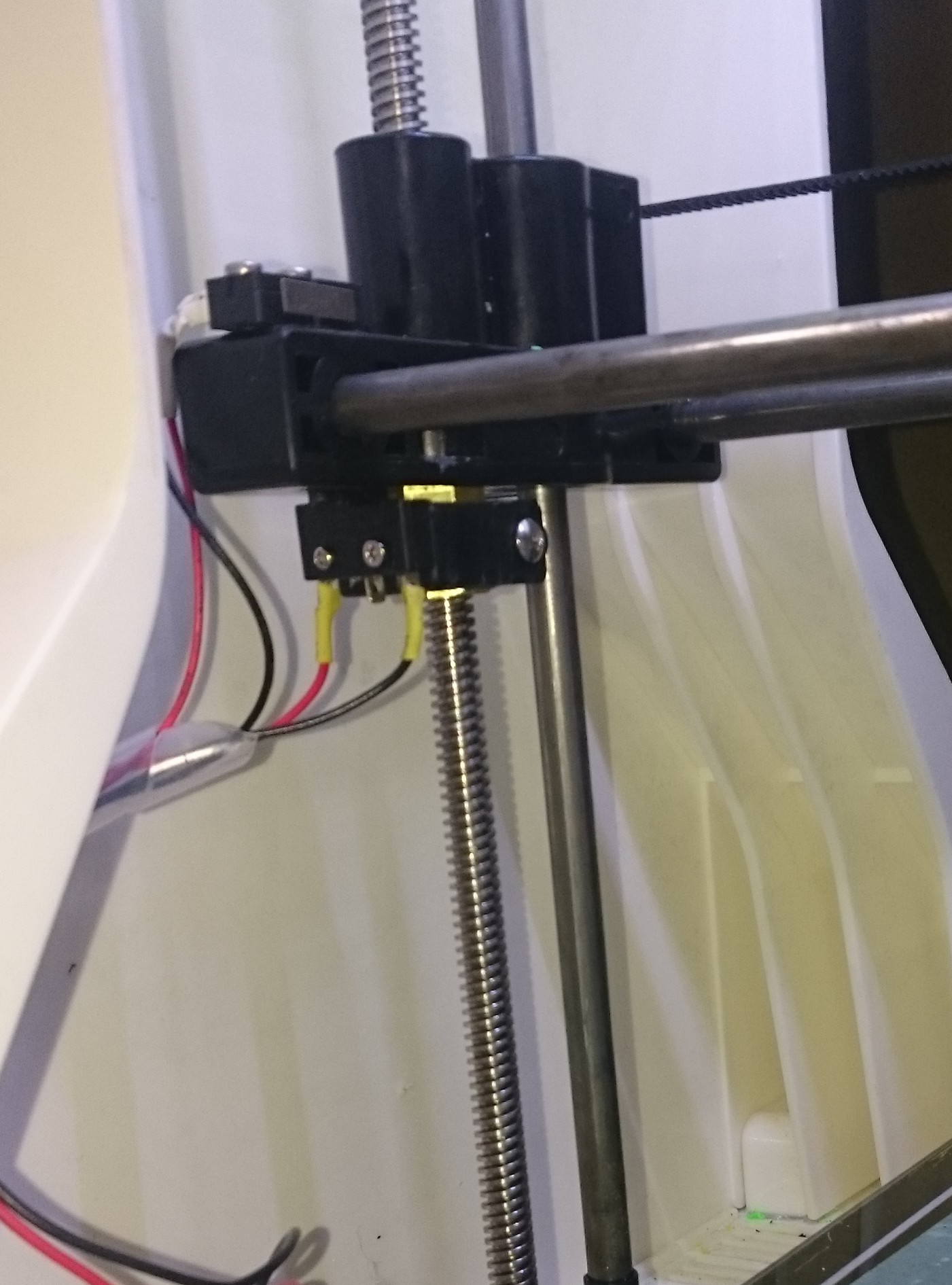
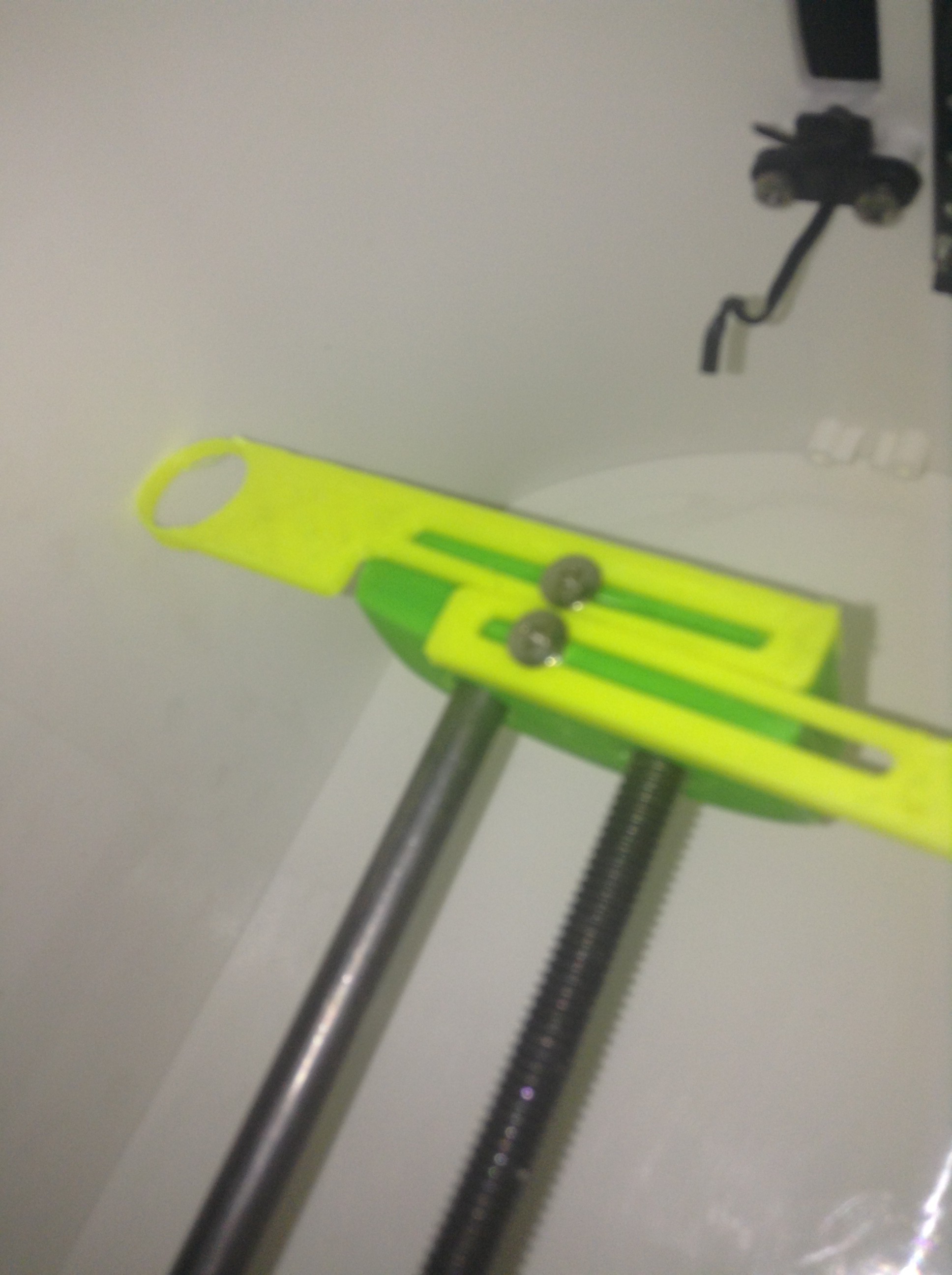
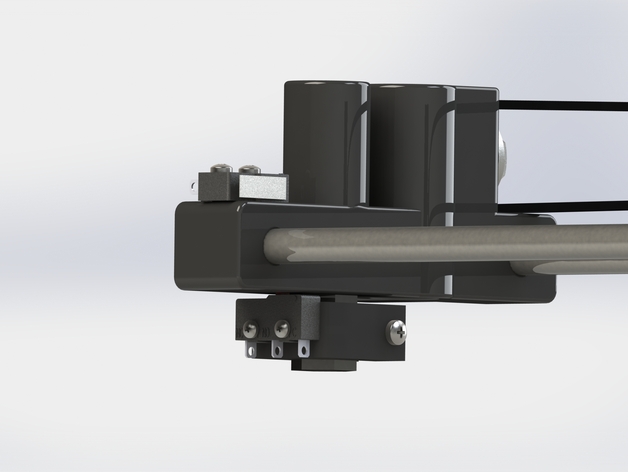
5) AutoLevelのセンサはマイクロスイッチなのだが取り付けのM2のネジが効いていない気がする箇所がある。ロック処置が必要。
6) 5)がおかしくなった場合には、フィラメント出力が止まってしまう可能性があるが、位置が下にずれてフィラメントが出なくなった場合には、エクストルーダーのドライブギアの切り込みでフィラメントが削れてしまっているのでフィラメント送りが進まなくなっている。ヘッドの温度を加熱設定してフィラメントを手操作で押しだすことで解消する。
















{kind=link}